小型化视觉系统正在承担越来越多“看清楚”之外的任务。在狭小装配空间、装备内部巡检、管道结构评估和微型机器人感知中,图像只提供平面外观;如果要判断前后位置、表面起伏或边界高度,还需要获得空间坐标。对光纤探头来说,难点在于如何把这些信息放进一个足够紧凑的端部。
相干光纤束适合做远距离图像搬运:纤芯阵列保持空间对应关系,远端的亮度分布可以传到近端相机。但距离测量属于另一类问题,通常要引入脉冲光、扫描控制、回波计时或额外探测链路。若沿用分立光学模块,系统很容易从“细探头”变成复杂的端部装配。
超构表面让光纤端面具有了更多自由度。通过纳米柱阵列写入相位,薄层器件便可执行聚焦、偏转和波前整形等功能。问题在于,单纯把透镜变薄并不足以完成多模态感知;关键是要重新组织光在光纤中的传播方式。
为了克服这一瓶颈,南京大学徐飞教授和王漱明教授联合团队提出了Janus超构光纤内窥系统,让同一块端面超构表面在两个方向上工作:一面服务于全彩图像获取,另一面服务于扫描发射和飞行时间深度读出,即实现所谓的Janus复用功能。南京大学现代工学院徐浩天博士(已毕业)与香港科技大学物理系/高等研究院李添悦研究员为共同第一作者;南京大学物理学院王漱明教授和现代工学院徐飞教授为通讯作者;丁昊天、方韶晨、马祥驭、陈豪杰、陈烨、熊毅丰参与了该工作。
2026年6月8日,论文“Full-color 3D visualization with Janus metafiber”发表于Nature Communications。该课题获得了量子科技国家重点研发计划 [2021ZD0300702] 以及 中国国家重点基础研究发展计划 [2021YFA1401103]的支持。
一、一套系统,两套信息
这套系统的核心,是把“成像”和“测距”看作同一光纤端部的两种工作状态。正向传播负责把目标场景投影到相干光纤束端面,反向传播负责把光纤束端面上的受控光斑转化为远端扫描角。两者共享端面超构表面,并通过时间分时复用避免相互干扰。其具体光路如图1所示。

图1 | Janus超构光纤的系统构型。白光照明、端面超构表面和相干光纤束构成彩色图像通道;脉冲激光、空间光调制器和雪崩光电探测器构成深度读出通道。两条链路共用光纤端部,并通过分时工作获得双模态数据。
这种设计避免了把彩色成像镜头、扫描器和测距接收端全部塞进同一个微小远端。实际工作中,端面器件和光纤束在两个时间窗口里重复利用,从而降低了通道耦合和结构堆叠压力。
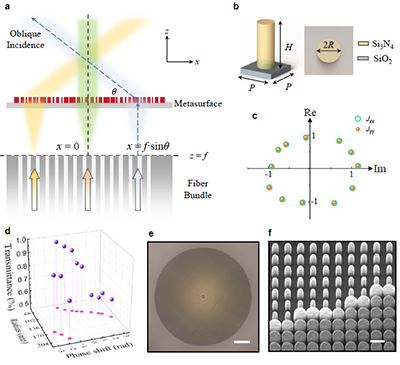
图2 | 纤端二次相位超构表面的结构与功能。纳米柱阵列提供相位分布;目标光入射时被聚焦到纤束,近端光斑反向出射时被转换为扫描角度。图中包含单元结构、设计响应、光学显微图和扫描电镜图。
图2展示了端面光学芯片的实现方式。器件采用氮化硅纳米柱和二氧化硅基底,通过半径调节获得接近2π的相位覆盖。其直径和焦距均约600 μm,数值孔径约0.4,与所用纤束的尺度相互匹配。在这个尺寸下,器件既能收集目标返回的可见光,也能把端面位置变化放大为远端角度变化。因此,近端可控的小位移可以转化为远端的大视场扫描,而无需在探头前端加入机械扫描部件。
二、彩色图像和扫描测距的表征
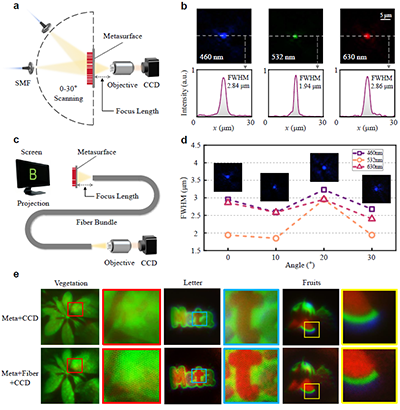
图3 | 彩色成像性能测试。实验给出了460、532和630 nm三种波长的点扩散函数,统计不同入射角下焦斑半高全宽,并比较直接由超构表面成像与经过相干光纤束传输后的图像。
论文因此先测试了可见光三个代表波长下的聚焦性能。如图3所示,在正入射条件下,460、532和630 nm对应的焦斑半高全宽约为2.84、1.94和2.86 μm。入射角扫到30°时,焦斑仍能被识别,意味着系统可覆盖约60°总视场。在图像实验中,经过光纤束之后会看到纤芯阵列带来的离散采样纹理,但主要颜色和空间结构仍然存在。这说明该正向链路能够完成全彩二维图像传输,而不是只提供单色强度信息。
接下来是反向链路。它需要回答两个问题:近端控制的光斑位置能否稳定对应远端角度,以及扫描出去的光束是否足够准直。

图4 | 反向发射链路的角度映射和ToF读出。实验验证了端面光斑位移与扫描角之间的关系,测量了不同角度下的发散角和效率,并通过回波脉冲计算目标深度。
图4中,焦点横向位移Δx与出射角θ满足Δx = f sinθ。实验点落在理论关系附近,说明二次相位超构表面确实把端面坐标转化为了扫描方向。该扫描同样覆盖约60°视场。光束发散角约1.2°到1.6°,整体低于2°。虽然大角度时透过率和总效率有所下降,但聚焦效率变化较小,说明主要限制来自有效孔径和信号强度,而不是波前功能失效。
测距实验使用约7.9 ns脉宽的532 nm激光脉冲。研究团队对回波上升沿进行正弦插值,并以半高位置确定飞行时间,在10–20 cm范围内完成2 cm步长标定,多个扫描角下均得到稳定深度结果。
三、从双通道读数到全彩三维点云
获得图像和距离之后,还需要把二者放到同一个坐标框架中。正向链路给出RGB纹理;反向链路给出距离,同时回波幅值还可作为532 nm下的反射率。
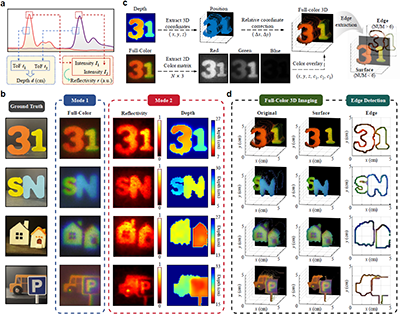
图5 | 全彩三维结果的生成流程。ToF信号提供深度和反射率,RGB图像提供颜色;系统通过坐标恢复、图像配准和颜色映射生成点云,并利用深度变化识别边缘轮廓。
图5展示了数字、字母、房屋模型、校车和停车标志等样品。彩色图给出外观,反射率图反映不同区域的回波强弱,深度图显示前后位置和表面起伏。三类信息对应到同一目标后,便形成了可视化的三维结果。实验中的反向扫描为50 × 50采样阵列,覆盖5 cm见方区域。同时作者还利用深度突变提取物体边缘。当扫描光斑落在物体边界时,回波会混入目标和背景两种深度分量,邻近点之间因此出现突变。系统可据此分离表面区域和轮廓边界,为后续目标识别或形貌分析提供补充信息。
这篇工作可以看作一种纤端多维感知架构:同一端面光学器件在正向完成彩色成像,在反向完成扫描和ToF读出,后端再把RGB、反射率和深度合成为三维点云。论文验证了约60°视场、低于2°的扫描发散角以及全彩三维可视化结果。除了无损探伤和工业内窥,这类设计也可面向微型机器人导航、受限空间定位、管腔结构建模、精密装配监测和紧凑型LiDAR等方向。它不但提供了在极端环境下的二维成像指标提升,而且把颜色与几何等多维信息一起带入了光纤尺度探头的实现方式。
论文信息:Haotian Xu, Tianyue Li, Haotian Ding, Shaochen Fang, Xiangyu Ma, Haojie Chen, Ye Chen, Yifeng Xiong, Shuming Wang, Fei Xu. Full-color 3D visualization with Janus metafiber. Nature Communications 2026.
https://doi.org/10.1038/s41467-026-74131-8.
- 暂无相关新闻
