电磁场已成为现代社会的重要基础技术,广泛应用于发电、通信、医学成像以及无线充电等领域。近年来,随着材料科学与增材制造技术的快速发展,电磁场的应用已从传统的通信、传感和无线能量传输,拓展为驱动功能材料与器件产生运动与变形的有力手段。相比机械、热或电流等驱动方式,电磁驱动具有非接触、可逆及响应快速的优势。更重要的是,基于电磁感应,电磁场不仅可作用于磁性材料,还可作用于导电材料,从而实现多种驱动机制,适用于广泛的材料体系。此外,电磁场的强度、方向和频率均可精确调控,显著提升了功能材料与系统的可编程性和设计自由度。因此,电磁驱动近年来在软体机器人、主动超材料、生物医学器件以及形状可变结构等工程领域得到了广泛应用。
近日,斯坦福大学赵芮可教授团队撰写了关于电磁驱动功能材料的综述文章,首次基于电磁场频率对电磁场的功能进行了系统分类,将其划分为四大类:零至数百赫兹范围内的磁力\磁矩驱动、零至兆赫兹范围内的洛伦兹力驱动、千赫兹至兆赫兹范围内的感应加热驱动,以及零到吉赫兹范围内的通讯、传感与能量传输。针对每一类功能,详细介绍了其物理与力学作用机理及典型功能材料与应用(图1),并进一步讨论了电磁驱动功能材料的设计优化方法及未来研究方向。
2026年1月7日,文章以 “Electromagnetic (EM)-Driven Functional Materials” 为题,发表在材料科学权威期刊《Advanced Materials》上。斯坦福大学博士生Jay Sim为论文第一作者,赵芮可教授为通讯作者,博士后鲁璐为共同作者(入选国家海外高层次人才引进计划青年项目,即将入职浙江大学航空航天学院)。
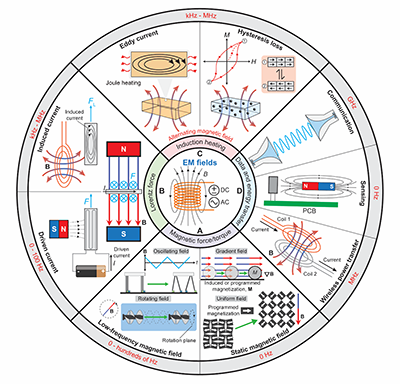
图1. 电磁场功能的分类与作用机理
基于磁力/磁矩的电磁驱动
基于磁力或磁矩的电磁驱动是应用最为广泛的电磁场驱动策略之一,其工作频率通常在零至数百赫兹范围内。这种驱动方式依赖于材料磁化强度与外加磁场之间的相互作用,从而产生体力或力矩,进而诱导磁性材料(如永磁体、磁响应复合材料、铁磁流涕)产生运动或变形。当所施加的是非均匀磁场并存在磁场梯度时,材料将受到沿磁场梯度方向的磁力;而当施加的是均匀磁场且磁场方向与材料的磁化方向不一致时,则会产生磁矩,使材料发生转动并趋向于与磁场方向对齐。在磁化状态给定的情况下,这两种驱动力均仅取决于外加磁场的大小、方向及其梯度等参数。因此,该驱动策略在静态和动态条件下均可灵活调控,为结构变形与运动的编程控制提供了更多可能性。文中系统讨论了在静态磁场(频率为零,如均匀磁场或梯度磁场)以及动态磁场(频率可达数百赫兹,如振荡磁场或旋转磁场)条件下,如何通过精确调控磁场分布并对材料磁化进行编程,实现对超材料、软体机器人等典型系统变形与运动的精准控制(图2)。

图2. 基于磁力/磁矩的电磁驱动及其功能应用
基于洛伦兹力的电磁驱动
基于洛伦兹力的电磁驱动是一种常用于导电材料的驱动策略,其工作频率通常覆盖从零到兆赫兹的宽广范围。这种驱动方式依赖于电流与外加磁场之间的相互作用,所产生的洛伦兹力同时垂直于电流方向和磁场方向。根据电流的产生方式不同,洛伦兹力驱动可分为两类。第一类电流由外部电源直接输入,此时外加磁场的频率通常为零至百赫兹。第二类电流则由交变磁场与导电材料之间的电磁感应产生,在这种情况下,磁场频率一般位于千赫兹到兆赫兹范围内。文中围绕这两种电流来源,详细讨论了洛伦兹力驱动的物理机理及其在软体机器人、软体制动器等典型系统中的应用(图3)。

图3. 基于洛伦兹力的电磁驱动机理与功能应用
基于感应加热的电磁驱动
基于感应加热的电磁驱动是温度响应材料与系统中常用的一类驱动策略,其工作频率通常在千赫兹到兆赫兹范围内。该方法通过施加交变磁场,在导电材料或铁磁材料内部产生热量,从而实现驱动。当交变磁场作用于导电材料时,材料内部会感生涡流,并通过焦耳热效应产生热量;而在铁磁材料中,加热主要来源于磁滞损耗,即磁畴在每个磁场循环中发生取向重排时所产生的能量耗散。无论是基于涡流损耗还是磁滞损耗的感应加热,其本质都由交变磁场驱动。文中详细介绍了这两种感应加热的物理机理,并进一步讨论了其在形状记忆聚合物、液晶弹性体、液态金属等温度响应材料中的驱动实现方式及典型应用(图4)。
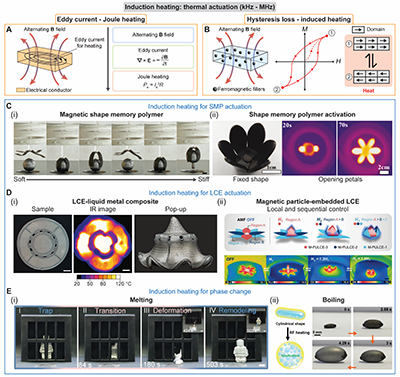
图4. 基于感应加热的电磁驱动机理与功能应用
面向通信、感知及无线能量传输的电磁场
电磁场不仅可用于软体机器人、主动超材料以及形状可变结构等功能系统的驱动,还可实现数据与能量的传输,从而具备通信、感知和无线能量传递等功能。这些传统功能的工作频率通常覆盖从零到吉赫兹的宽广范围,其相关应用构成了现代电子系统的基础。在功能材料与器件领域,电磁场越来越多地被用于驱动与数据、能量传输的一体化集成,使系统能够实现更高水平的自主性和更复杂的功能。文中系统介绍了电磁场在通信、传感及无线能量传输中的基本机理,并讨论了其在天线、传感器、软体致动器及能量转换器等功能结构器件中的应用(图5)。

图5. 面向通讯、感知及无线能量传输的功能结构应用
电磁驱动功能材料的设计优化
电磁驱动功能材料与器件的性能高度依赖于外加电磁场的设计以及与之相互作用的材料和结构体系。目前,大多数相关应用仍主要采用正向设计思路,即通过反复试错来实现期望功能。近年来,基于优化与机器学习的方法逐渐成为有力工具,通过对外加电磁场分布、几何构型、材料结构以及系统的驱动路径等关键参数进行协同优化,使材料和器件能够实现给定的目标性能。文中围绕不同的优化策略(如梯度优化、遗传算法和拓扑优化)以及机器学习方法(如强化学习),重点讨论了其在电磁驱动形状可变结构、软体机器人和超材料等系统逆向设计中的应用(图6)。

图6. 基于优化和机器学习方法实现的电磁驱动功能材料和器件的逆向设计
未来展望
文章最后对电磁驱动功能材料与器件的若干潜在研究方向进行了展望。例如,基于磁力或磁矩的驱动已广泛应用于功能系统中,但其磁化分布通常在制造后即被固定,在一定程度上限制了器件的可重构性与环境适应性。如何在单一均匀磁场下实现磁化方向的实时重编程,从而使同一器件能够在不同变形模式与运动方式之间动态切换,仍有待深入研究。目前,大多数电磁驱动系统仍采用单一驱动模式,即仅依赖一种致动机理。事实上,将多种互补的电磁驱动机制进行耦合,有望显著拓展系统的可实现行为空间,从而提升电磁致动器的多功能性与适应性。此外,现有电磁驱动系统的状态监测主要依赖可视化手段,在感应加热驱动中通常辅以红外成像。如何将磁传感器集成到电磁驱动系统与器件中,实现驱动过程中磁场信息的实时感知与自适应调控,对于推动软体机器人和可变形结构向闭环控制与全自主运行发展具有重要意义。在设计方法方面,机器学习与优化技术已在磁力或磁矩驱动系统中取得显著进展;相比之下,针对洛伦兹力和感应加热驱动变形模式的相关研究仍相对不足。深入理解这些系统中磁、电、热与力学响应之间的多物理场耦合关系,并据此建立高精度的学习与优化框架,将是实现上述两类电磁驱动系统逆向设计与高性能调控的关键方向。
赵芮可教授团队主页链接:https://zhaolab.stanford.edu/
论文链接:https://doi.org/10.1002/adma.202521268
- 暂无相关新闻
