宁波材料所陈涛/尹恺阳/肖鹏团队 Angew:氢键超分子网络赋予可进化液晶弹性体机器人的温和编程
2024-10-23 来源:高分子科技
在自然界中,许多生物体会根据不断变化的环境对自身结构进行重编程,以提高生存机会。液晶弹性体(LCE)因其优异的可编程性及快速、可逆的热致应变,成为可重编程驱动器材料的理想选择。受生物自我调节机制启发,研究人员开发了热辅助组装的LCE驱动器。然而,现有的可重编程LCE驱动器的编程过程通常需要在超过120°C的高温环境中进行,这可能导致对齐的液晶元在聚合物网络中松弛,从而削弱其形状变形性能,并限制其在生物应用及与低耐热材料的集成能力。而且,较高的编程温度还需进一步提高驱动温度:如果材料的驱动温度(TNI)低于编程温度,LCE在模块化编程过程中会不可避免地首先触发形状变形,造成组装界面的不均匀,难以满足精确的设计要求。
2024年10月17日,该工作近期以题为“Hydrogen-bonded Supramolecular Network Enabled Gentle Reprogramming of Liquid Crystal Elastomer toward Evolutionary Robot”的论文发表在Angewandte Chemie International Edition (Angew. Chem. Int. Ed., 2024, e202416095;DOI: 10.1002/anie.202416095)。
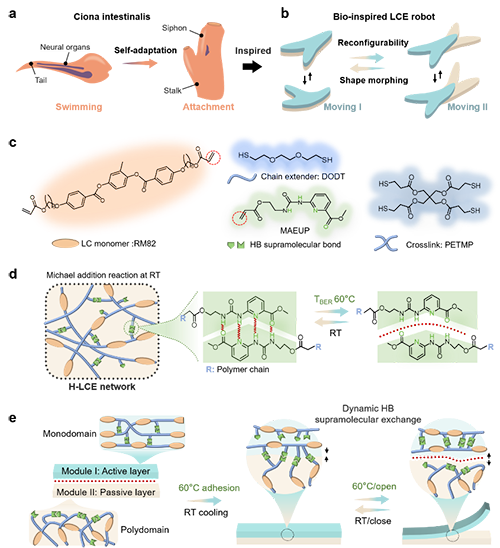
图1.实现可编程氢键超分子液晶弹性体(H-LCE)驱动器的仿生基础原理图。
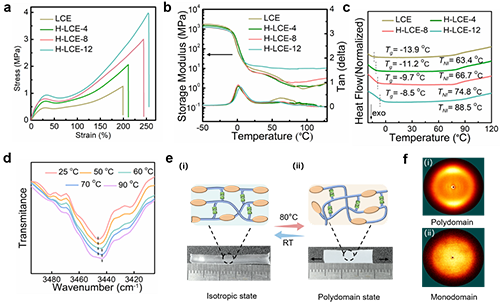
图2.氢键超分子LCE的构筑及其基础物化性能。
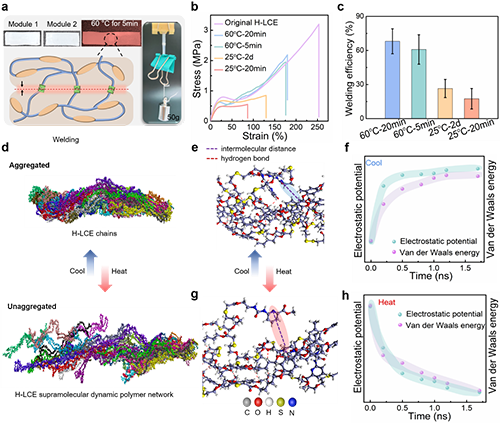
图3.模块化组装过程调制及超分子液晶网络网络重排的机理分析
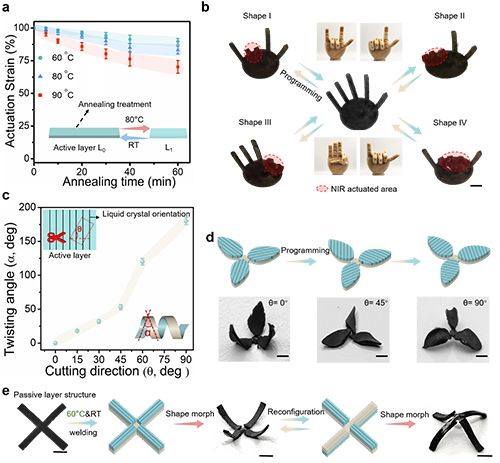
图4.超分子LCE驱动器的设计与重构原理。
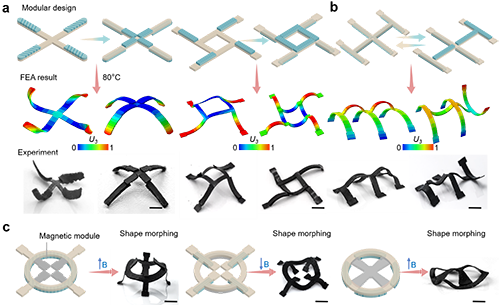
图5.面向制造复杂体系结构和多功能模块编程的CH-LCE模块化重编程和重配置。
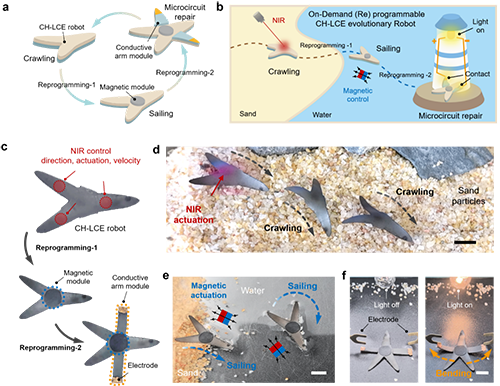
图6.进化型软体机器人的设计与概念化验证
原文链接:https://doi.org/10.1002/anie.202416095
版权与免责声明:中国聚合物网原创文章。刊物或媒体如需转载,请联系邮箱:info@polymer.cn,并请注明出处。
(责任编辑:xu)
相关新闻
- 四川大学雷景新教授、符笑伟副研究员 Macromolecules:通过强氢键增强纳米结构设计可持续高强韧热塑性弹性体 2026-06-29
- 天科大刘苇教授、武大陈朝吉教授 Sci. Bull.: 多重氢键网络赋能生物质纳米复合凝胶电解质 - 实现低温水系锌离子电池超稳定运行 2026-06-27
- 长春应化所陶友华/王彦超团队 Angew: 非经典氢键辅助的交硫酯立体选择性聚合 2026-06-25
- 厦门大学曹学正/吴晨旭《Macromolecules》: 活性纳米颗粒掺杂实现超分子凝胶增强增韧的动力学统计与流变机理揭示 2024-03-08
- 上海大学苏佳灿教授团队 Mater. Horiz.:具备可控表面刚度的双网络DNA-丝素蛋白水凝胶调控成软骨分化 2024-01-19
- 深圳大学黄思雅课题组 AFM:受蜘蛛丝启发的具有应变强化、高阻尼和超收缩性能的非均相超分子网络 2023-08-23
- 南开大学刘遵峰合作团队 AM:破解液晶弹性体纤维力学-驱动-阻尼三元矛盾→揭示全新连续液晶相变过程 2026-07-10
