南航姬科举课题组 Small:压力诱导的可控仿生黏脱附技术
2023-09-21 来源:高分子科技
“强黏附、易脱附”是仿生黏附技术在工程应用中的基本力学需求,特别是黏脱附切换的便捷性、经济性与可靠性,直接影响着界面操控自动化的实现程度。壁虎、苍蝇、蜘蛛等生物依靠足底刚毛结构的角度控制,拥有了攀岩走壁的全空间运动能力,近年来国内外学者借以热、光、电、磁以及类壁虎角度等方式实现了仿生黏附-脱附控制,甚至展现出了足以媲美生物黏脱附控制的能力,为仿生黏附技术的工程应用奠定了基础。

图1 仿生黏附材料的作用机理
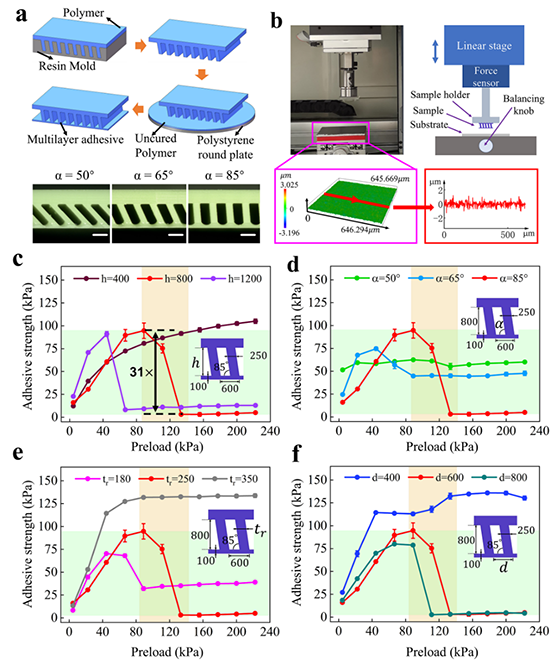
图2 仿生黏附材料的制备及其黏附性能
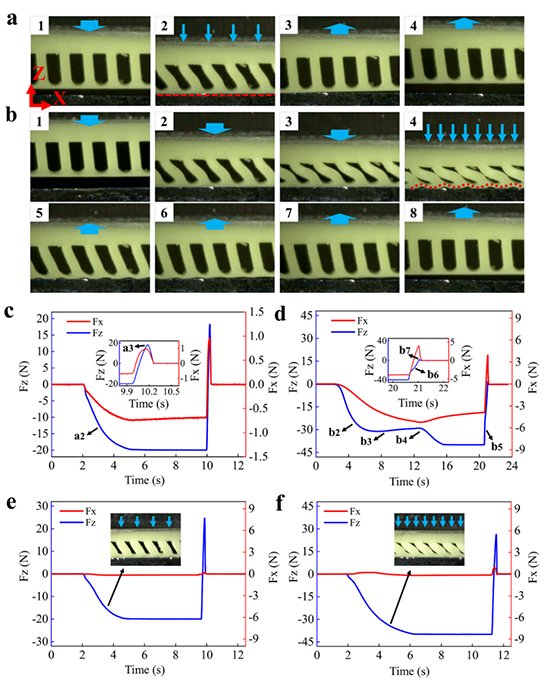
图3 仿生黏附材料在低压力和高压力下的界面接触与自身微结构变形过程
仿生黏附材料在低压力和高压力的作用下的变形过程显示:低压力下,黏附材料的底面与接触面始终保持良好的接触;在高压力下,黏附材料中间层发生大变形导致了底面的屈曲,且在力卸载的过程中,弹性体应变的迟滞造成仿生黏附材料底面与基底的接触并没有恢复如初,进而完成界面的脱附行为。
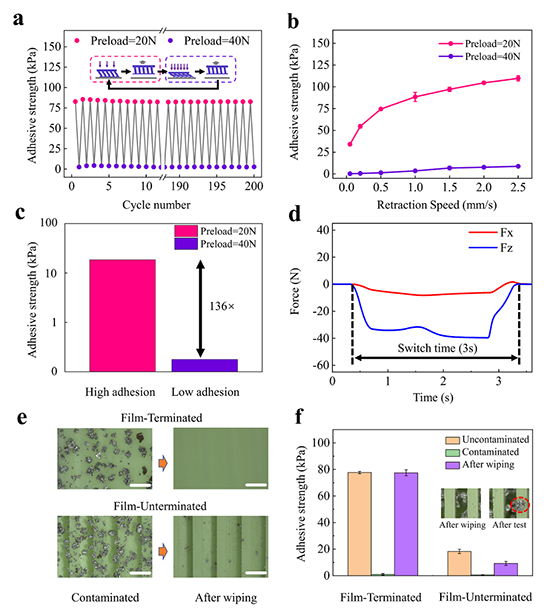
图4 仿生黏附材料的力学影响因素与使役特性分析

图5 多层级黏附材料的实际搬运应用及综合性能评价
论文链接:https://onlinelibrary.wiley.com/doi/10.1002/smll.202305091
版权与免责声明:中国聚合物网原创文章。刊物或媒体如需转载,请联系邮箱:info@polymer.cn,并请注明出处。
(责任编辑:xu)
相关新闻
- 华科大谭必恩教授团队 Macromolecules:OTs基交联剂“编织”柔性超交联聚合物 - 压力诱导“门控效应”助力高效甲烷存储 2026-04-02
- 北京高压科学研究中心李阔、郑海燕课题组 JACS:“一种分子,两种结构” - 高压拓扑聚合制备范德华异质结 2023-03-21
- 天津大学王彬教授 Angew:温度梯度辅助解聚实现 7/14 元环碳酸酯选择性合成及高性能脂肪族聚碳酸酯可控制备 2026-05-22
- 哈工程刘天亿、复旦大学孔彪 ACS Nano:非对称聚合物半导体纳米机器人的可控合成与感染皮肤创面治疗 2026-04-16
- 长春应化所陶友华研究员团队 JACS:阴离子结合催化实现聚(1,3-二氧戊环)的可控合成 2026-03-27
- 中国科大龚兴龙教授课题组《Sci. Adv.》:仿生石蚕蛾幼虫巢穴 - 打造高安全高性能锂金属电池的“刚柔并济”电解质 2026-07-10
- 北航罗斯达教授 Sci. Adv.:激光编程软执行器-解锁仿生软体机器人变形定制新方法 2026-07-04
