在柔性电子、生物医疗和智能制造等领域,对具备响应性、可编程性与可重构性的材料需求日益增长。磁性软材料因其对磁场的快速响应和结构灵活性,成为构建智能系统的理想候选。然而,实现复杂三维结构与磁性行为的同步编程仍面临工艺与功能集成的双重挑战。荷兰格罗宁根大学医学中心 (UMCG) 与特文特大学的研究团队在《Cell Reports Physical Science》上发表了一项题为Fluidic control programming for 3D magnetic soft metamaterials with reconfigurable mechanical behaviors的研究,通过流体控制技术成功实现了对3D磁性软超材料(MSM)进行磁化编程,使其力学性能在不同状态间快速重构。
研究团队设计了一种基础单元,通过流体控制技术实现单元内部磁化体素的精细调控。各个体素在磁场作用下产生精确可控的弯曲变形,通过特定磁化模式,可使结构在不同磁场条件下表现出磁响应变形引导的压弯屈曲,宏观上展现出可切换的正、负泊松比,实现了材料力学性能的灵活调控能力。
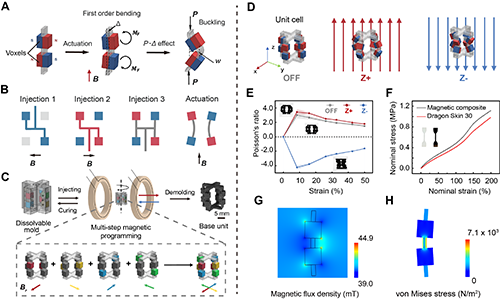
图1:磁场引导下的软超材料基础单元弯曲机制示意图
为实现复杂3D结构的磁性分布,研究团队开发了一种多步流体注射工艺。该方法通过设计3D流控通路,使用精密注射和磁场定向控制磁性颗粒的排列方向。通过逐步固化和分批注射,最终获得具有复杂磁化方向的整体结构,成功解决了传统方法难以实现的3D磁化布局难题。
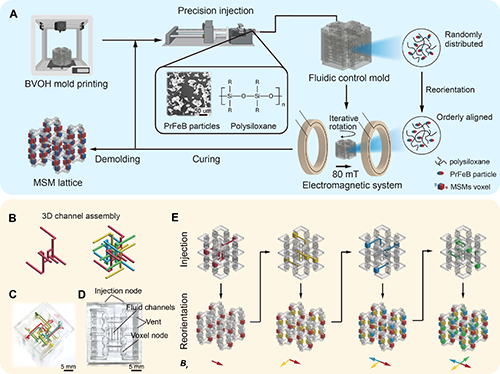
图2:多步流体注射磁化编程工艺示意图
研究团队进一步构建了8单元MSM晶格结构,并在不同磁场条件下进行了加载实验。结果表明,晶格结构可以在磁场作用下快速、稳定地在正泊松比(膨胀模式)和负泊松比(收缩模式)之间切换,且具有出色的力学性能和重复使用稳定性。
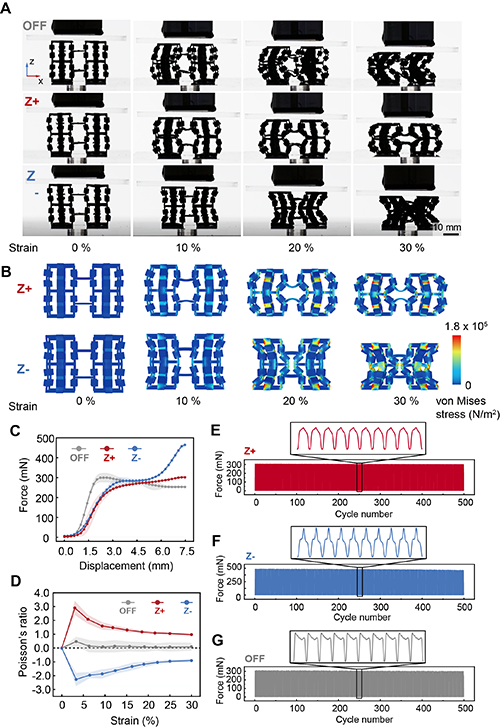
图3:不同磁场条件下超材料晶格结构的压缩变形模式示意图
此外,研究还实现了正交各向异性结构的磁性响应,通过精确控制磁化方向,实现了在不同轴向平面分别表现出正负泊松比的独特性能。这种结构在不同磁场条件下表现出显著的正交各向异性特征,具有广泛的潜在应用。
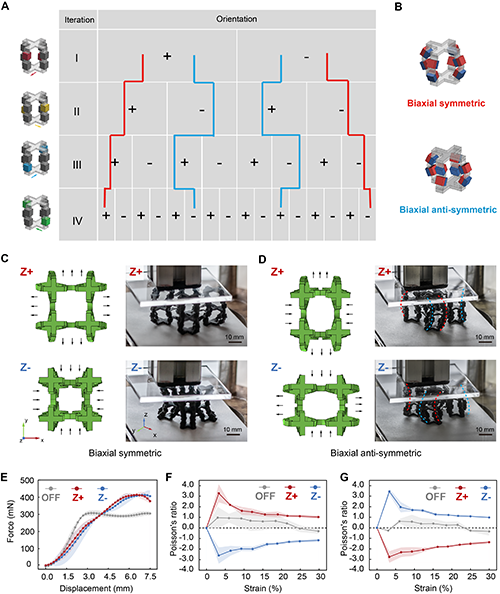
图4:双轴正交各向异性磁性超材料的结构与性能表征
为展示材料在实际应用中的潜力,团队还展示了MSM结构在软体机器人和电子器件领域的应用。通过磁场快速响应,研究人员成功实现了软机器人在管道内的精确载荷控制和电子电路开关控制,展现出这种材料在高端制造和智能装置领域的巨大潜力。这一研究不仅实现了磁响应与结构制作的高度解耦,更提供了一种灵活且可控的工艺路线,对推动智能材料在未来高端制造领域中的应用具有重要意义。
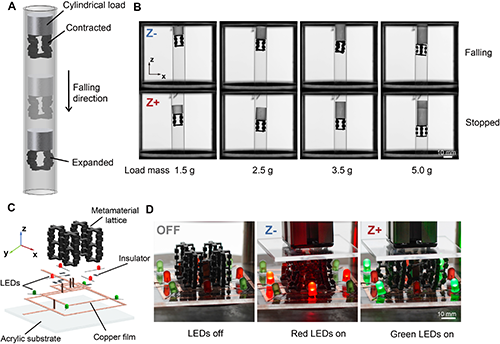
图5:磁性软超材料在软体机器人和电子控制方面的功能演示
原文链接:https://www.cell.com/cell-reports-physical-science/fulltext/S2666-3864(24)00403-X
