浙江农林大学傅深渊教授团队《Chem. Eng. J.》:基于模量图案化策略实现介电弹性体驱动器的定向驱动变形
2022-06-27 来源:高分子科技
定向驱动是生物运动中的一种重要运动形式,如:手指的定向弯曲运动和翅膀的上下拍动等。因此,仿生制备具有定向驱动变形功能的柔性驱动器对于实现高性能的软体机器人具有重要的意义。其中,介电弹性体(DE)在外电场作用下具有毫秒级响应,高能量密度和大的驱动应变等优点,被誉为新一代的人工肌肉,已被广泛用于制备柔性驱动器和软体机器人。然而,目前基于力学各向异性DE材料开发制备的具有定向驱动变形功能的柔性驱动器还存在一些问题,如:力学各向异性模量差异小、热稳定性差和较难实现局部可控的定向驱动变形等。
针对以上挑战,浙江农林大学傅深渊教授团队通过自由基共聚合将含有不饱和双键的植物油基单体引入到热固性DE薄膜中,利用巯基-烯的点击反应实现了热固性DE薄膜的进一步可控紫外光交联。紫外光交联后薄膜的初始模量可提高10倍以上(由0.28 MPa提升至3.00 MPa);同时可通过图案化的紫外光照射实现DE薄膜模量的图案化设计,从而实现DE驱动器的可控驱动变形。

图1. 力学各向异性DE薄膜的定向驱动变形示意图

图2. 具有后交联功能的热固性DE薄膜的制备及工艺优化
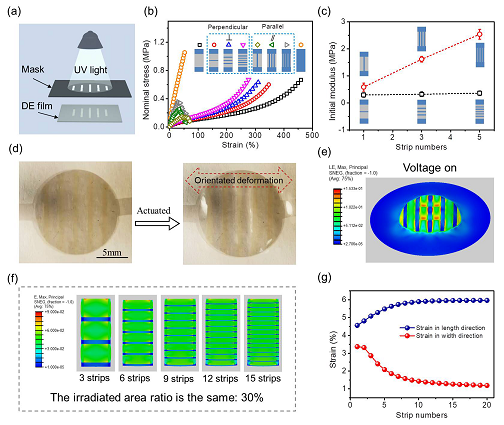
图3. 力学各向异性DE薄膜的制备及其定向驱动性能验证
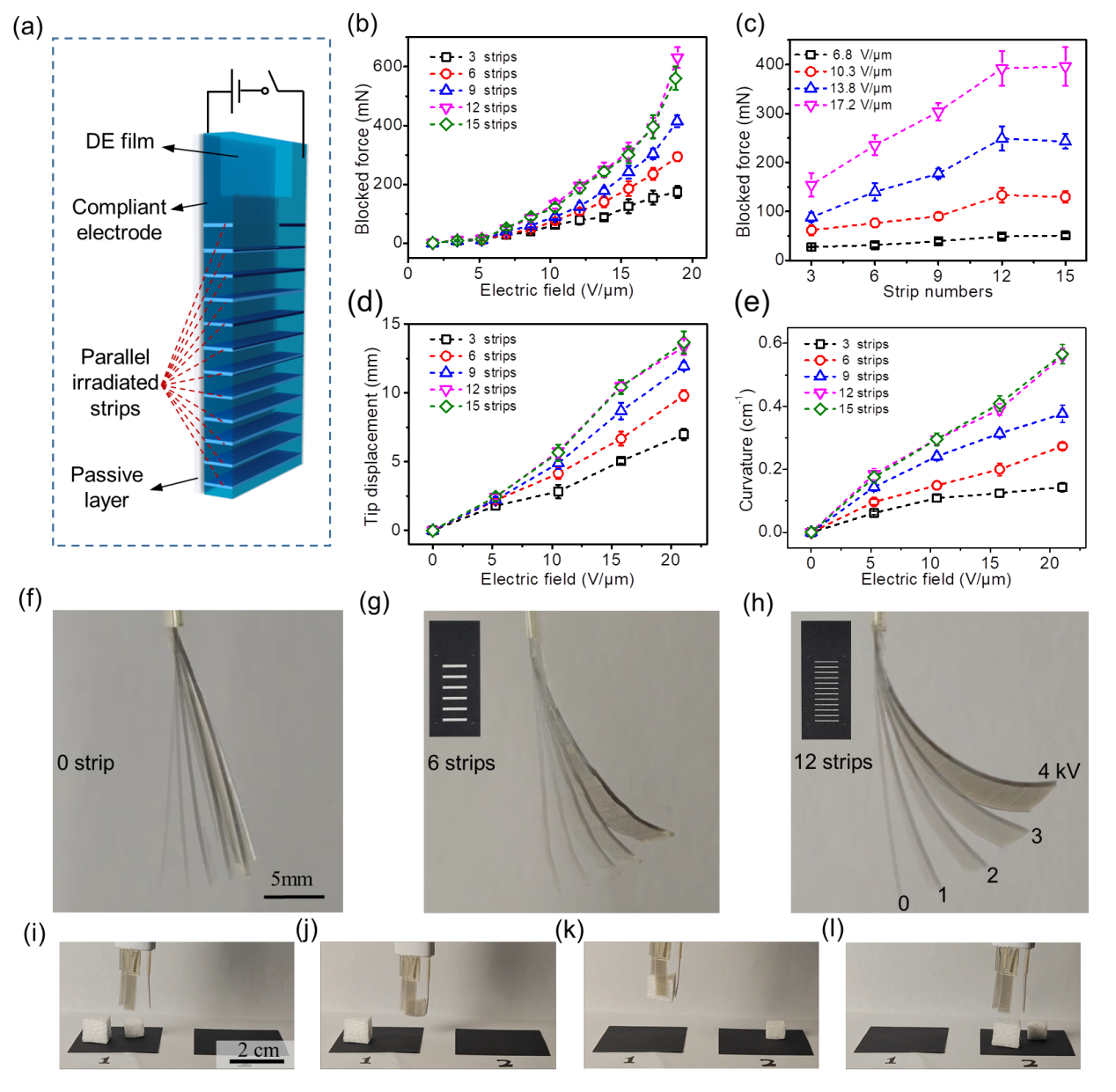
图4. 高性能DE弯曲驱动器的制备及其应用展示
原文链接:https://www.sciencedirect.com/science/article/pii/S1385894722032211
版权与免责声明:中国聚合物网原创文章。刊物或媒体如需转载,请联系邮箱:info@polymer.cn,并请注明出处。
(责任编辑:xu)
相关新闻
- 北京化工大学杨丹教授 Nano Energy:基于强界面结合力的自供电整体自愈合介电弹性体致动器 2025-04-22
- 清华大学党智敏教授团队《Nat. Commun.》:共振频率可以达到200 Hz的丙烯酸酯弹性体 2024-11-19
- 南京大学徐飞教授 AFM:具有高环境稳定性的眼压监测智能隐形眼镜 2024-04-17
- 华南理工大学刘伟峰《ACS Sustain. Chem. Eng.》:具有类肌肉取向结构的生物质增强增韧导电水凝胶 2022-10-05
- 广州大学刘鹏和NCL谢丰蔚 ACS Sustain. Chem. Eng.:淀粉水凝胶构建全淀粉基柔性电池和自供电柔性传感材料 2022-05-17
- 南开大学刘遵峰教授 Nat. Commun.:用于微流体传感、操控的螺旋中空纤维 2022-03-19
- 中国科大龚兴龙教授团队《Compos. Part B》:具有热致形状记忆和局部磁编程特性的多刺激响应软致动器 2025-08-29
