由柔性材料制成微型软体机器人具有可变形、适应性强等特点,可以实现对物体的无损伤抓取,在微环境修复、生物活检和药物控制释放等领域有广阔应用前景。微型软体机器人需要逻辑运算分析周围的信息以实现更加智能的控制,但将传统电子芯片和电源等器件集成到微型软体机器人系统上是一个巨大挑战。
针对以上问题,西北工业大学张轩博士、孔杰教授提出了一种全新的环境刺激响应性逻辑门途径,将逻辑运算能力整合到微型软体机器人中,而无需外加电源输入和缆线控制,便可实现微型软体抓手机器人的环境刺激响应性智能控制。

图1 刺激响应性水凝胶构筑的逻辑运算微型软体抓手机器人示意图
刺激响应性水凝胶构筑的逻辑运算微型软体机器人抓手设计原理是通过对抓手结构进行立体像素化设计,将微型抓手的形变与逻辑门相结合,随着抓手结构复杂度的提高,微抓手逻辑运算的复杂性也随之提高。通过刺激响应水凝胶作为构建块,构建了分别执行“或”、“与”、“非”、“或非”、“与非”等逻辑门的微型抓取机器人。虽然水凝胶会对不同种类的刺激信号产生反应,但它们的输出结果相似,水凝胶大小的变化导致了抓手臂的弯曲。因此,逻辑门可以很容易地集成在一个微型抓手内(例如连接一个“与”门到另一个“与”门)。此外,双响应水凝胶制作的微型抓手可以在不同的环境刺激下智能自主地切换“与”门到“或”门。同时研制了一种具有“与”门的磁性微抓手,它可以通过环境响应逻辑门分析不同的刺激,捕获和释放目标物体。使用刺激响应性水凝胶作为构建模块来制造逻辑微抓手的策略具有灵活性,根据具体应用的需要,刺激响应性水凝胶的种类可扩展为可以对电场、光、压力、气体和生物分子等外部刺激做出响应的多种水凝胶。
研究亮点Ⅰ:使用刺激响应性水凝胶作为构筑模块,构建了系列能进行逻辑运算的微型抓取机器人
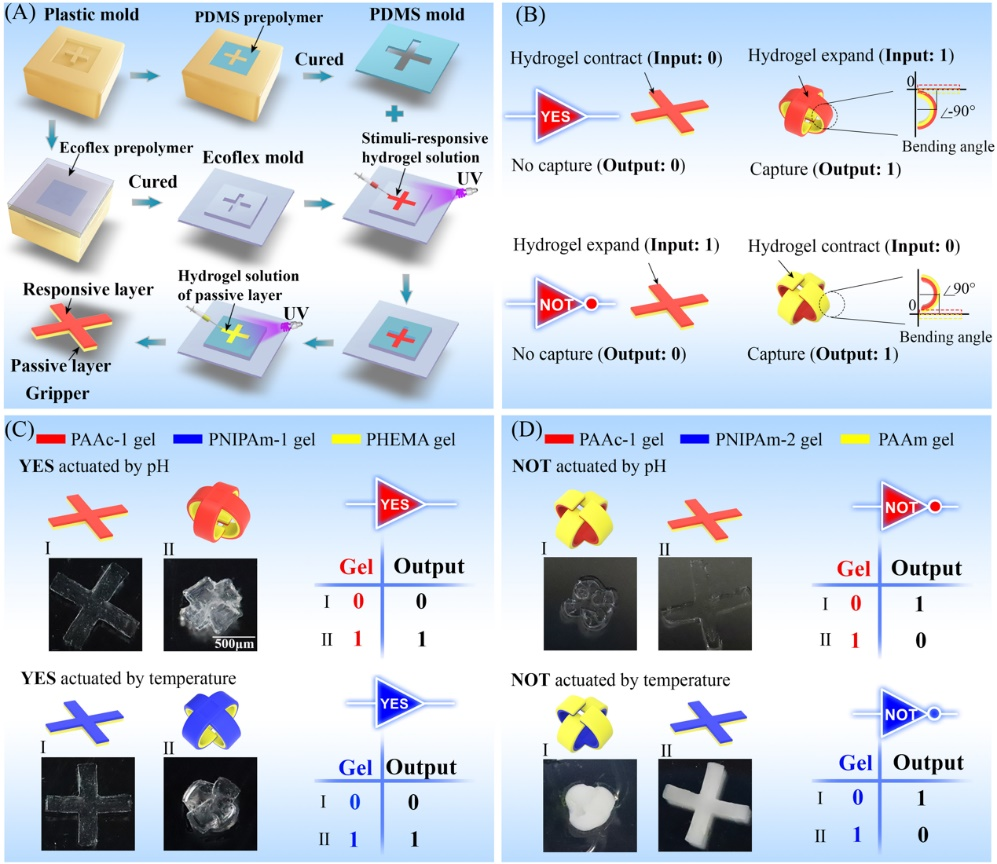
图2 具有YES/NOT逻辑门的微型抓取机器人设计

图3 两种输入信号逻辑运算的微型抓取机器人的设计
研究亮点Ⅱ:在一个微型抓取机器人上实现了多逻辑门的集成,为需要复杂计算的高级系统提供了新路径

图4 集成两个“与”门的微型抓取机器人的设计
研究亮点Ⅲ:在微型抓取机器人系统中引入双响应水凝胶,实现了不同环境刺激下内部逻辑门的智能自主切换

图5根据环境刺激在“或”门和“与”间切换的微型抓取机器人的设计
综上可见,该研究提供了一种在微型软体机器人中集成逻辑运算的方案,通过刺激响应性水凝胶作为构建块,构建了一系列具有逻辑运算能力的微型抓取机器人。根据具体应用的需要,刺激响应性水凝胶的种类可以扩展为可以对电场、光、压力、气体和生物分子等外部刺激做出响应的多种水凝胶,从而实现该方案多种特定环境的应用。通过体素化设计和体素化制造,可以提高微型抓手逻辑运算的复杂性,实现复杂系统的控制。该策略为微型独立式材料、致动器、软机器人的感知、控制和计算一体化设计开辟了新的道路。相关成果以“Small-scale Soft Grippers with Environmentally Responsive Logic Gates”最新发表于英国皇家化学会材料领域旗舰期刊Materials Horizons上,并被选为当期的Back Cover。论文第一作者和共同通讯作者为西北工业大学张轩副教授,通讯作者为西北工业大学孔杰教授。
上述研究工作得到了国家自然科学基金项目,陕西省自然科学基础研究计划,中国博士后科学基金面上资助,中央高校基本科研业务费等项目支持。
论文链接:https://doi.org/10.1039/D2MH00097K
下载:Small-scale Soft Grippers with Environmentally Responsive Logic Gates
- 苏科大李琳团队/南邮李炳祥团队 Adv. Mater.:具有多重刺激响应性的形状记忆胆甾相液晶弹性体 2026-05-10
- 中南民大张道洪/许泽军团队 AFM:用于防伪的刺激响应性可回收室温超长磷光(RTP)聚合物 2025-07-15
- 南京大学李承辉团队 Angew:由动态配位键构造的具有多刺激响应性的新型机械自适应材料 2024-03-12
- 长春工大刘鑫、张钦课题组 Angew:一种兼具高机械强度与高锌离子迁移率的可回收超分子水凝胶电解质用于稳定锌负极 2026-07-13
- 浙江大学赵骞教授、浙江省肿瘤医院张宇华团队 Adv. Mater.:在可编程的自发变形水凝胶方面取得进展 2026-07-12
- 天工大张松楠 AFM 综述:水凝胶为光伏板“退烧” - 开启水-能协同热管理新路径 2026-07-10
- 中山大学蒋乐伦教授团队《ACS AMI》:固-液可切换磁驱动微型软体机器人 2022-07-04
