东南大学杨洪教授团队《Nat.Commun.》:软体机器人运动方向调控新策略
2019-10-14 来源:中国聚合物网
日前,东南大学化学化工学院杨洪教授课题组在光控软体机器人研究领域取得重要进展,科研团队报道了一种利用可见和红外三个波段的光去操控软体机器人运动方向的调制策略。研究成果发表在国际顶级期刊《自然通讯》杂志上。
光控软体机器人是智能仿生机器人研究领域的热点方向。然而,如何实现软体机器人运动方向的便捷调控,是该领域目前急需解决的一个关键科学性问题。传统的光刺激调控法,需要将光束集中在软体机器人的某个局部区域,或者沿某个角度或方向去照射软体机器人,使之产生局部的形变差异,进而推动软体机器人沿某个方向前进。例如,在文献中经常看到的场景是,将光束照射在软体机器人的头部,使其后退;照射在尾部,使其前进;从左向右扫描软体机器人,使其右拐;从右向左扫,使其左转。此类光刺激调控法缺乏便捷性,非常不方便。
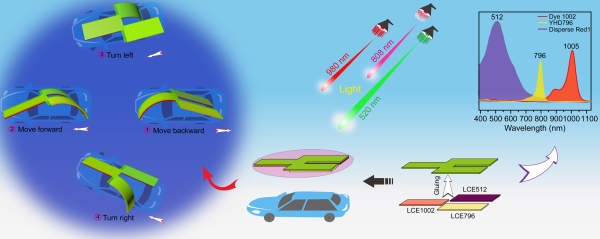
东大科研团队另辟蹊径,构建了多层次结构的液晶弹性体基软体机器人,在不同的结构层次中加入三种分别对520nm、808nm、980nm波段光源响应、且互不干扰的有机光热转换试剂,从而利用可见和红外三个波段光的开/关变化去操控软体机器人的运动方向。和传统的光刺激调控法相比,该方法是通过软体机器人不同区域对光刺激的选择性吸收,来实现整体的形变差异,进而推动软体机器人运动,因此光源的照射位置、方向、角度等因素都不会对运动方向产生根本性影响。该策略为实现软体机器人运动方向的便捷调控提供了新思路。论文第一作者为2016级博士生左波同学。
版权与免责声明:本网页的内容由中国聚合物网收集互联网上发布的信息整理获得。目的在于传递信息及分享,并不意味着赞同其观点或证实其真实性,也不构成其他建议。仅提供交流平台,不为其版权负责。如涉及侵权,请联系我们及时修改或删除。邮箱:info@polymer.cn。未经本网同意不得全文转载、摘编或利用其它方式使用上述作品。
(责任编辑:xu)
相关新闻
- 复旦大学陈茂课题组 Nat. Commun.:光控交替共聚制备高结晶度ECTFE及其热塑性材料 2025-12-17
- 国科大/中科院杭州医学所赵紫光、南科大陈伟鹏 ACS Nano:纳米相分离异质凝胶实现双向光控离子梯度能调控 2025-10-22
- 清华大学许华平教授团队/燕立唐教授团队 Adv. Mater.: 光控可演化高分子材料 2025-09-08
- 北航罗斯达教授 Sci. Adv.:激光编程软执行器-解锁仿生软体机器人变形定制新方法 2026-07-04
- UCLA贺曦敏团队 Sci. Adv. 封面:球形无系留自维持滚动机器人 2026-05-01
- 哈工大(深圳)朱时裴教授课题组诚招硕士、博士、博士后 - 材料、化学、物理、机械、生物工程 2025-09-17
- 山东大学李阳/苏州纳米所张其冲/光云大学金南英 Small:人工智能驱动的全织物仿生电子皮肤的直觉和触觉双模传感用于智能材料感知 2023-12-01
