Nature Communication: 流体动力元件研究进展!浙大杨华勇院士/徐兵教授团队与大连理工孙希明教授团队,研发“电液动力芯片”
2025-02-12 来源:高分子科技
您是否想过,未来的小型机器人可以像章鱼一样多腿灵活运动与控制,或像水母一样多足轻盈灵活游动?传统多路流体动力小型机器人往往依赖多个刚性泵和阀来实现系统的驱动与控制,严重限制了系统的便携性和灵活性。近来,浙江大学团队与大连理工大学团队合作在《Nature Communication》发表研究成果——《Flexible electro-hydraulic power chips》(柔性电液动力芯片),可通过模块化柔性设计与3D打印技术将多路流体动力源“芯片化”设计与制造,从而实现小型机器人系统的多路驱动与复杂控制及高功率密度输出。这项技术或将为小型机器人、可穿戴设备等提供新的轻量便携的解决方案!浙江大学张超研究员为论文第一作者,浙江大学祝毅教授、张超研究员和大连理工大学徐昌一副教授为论文共同通讯作者,浙江大学杨华勇院士、徐兵教授、张军辉研究员和大连理工大学孙希明教授参与指导工作。

图1 柔性电液动力晶体管的设计、制造与功能
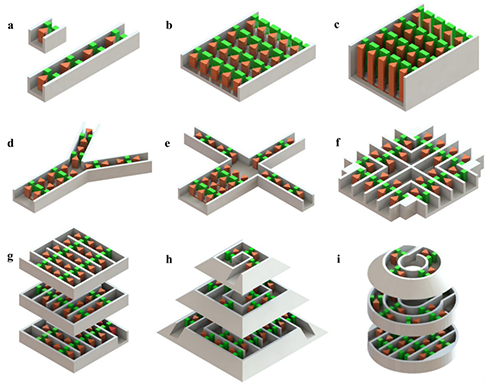
图2 电液动力芯片的“点-线-面-体”三维空间系统布局。
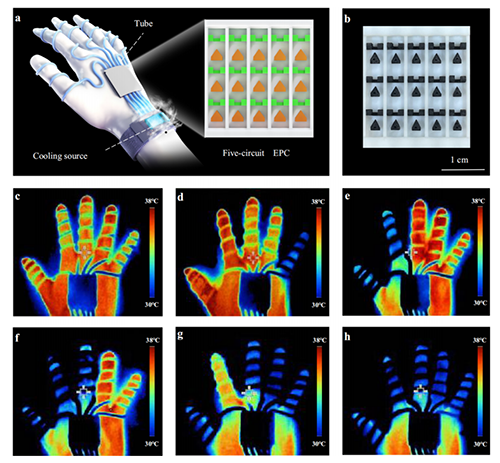
图3 电液动力芯片驱动的穿戴式手套。
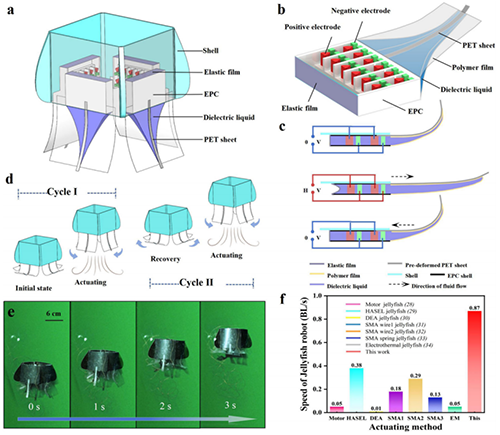
图4 电液动力芯片驱动的小型水母机器人。
论文链接:https://doi.org/10.1038/s41467-025-56636-w
版权与免责声明:本网页的内容由中国聚合物网收集互联网上发布的信息整理获得。目的在于传递信息及分享,并不意味着赞同其观点或证实其真实性,也不构成其他建议。仅提供交流平台,不为其版权负责。如涉及侵权,请联系我们及时修改或删除。邮箱:info@polymer.cn。未经本网同意不得全文转载、摘编或利用其它方式使用上述作品。
(责任编辑:xu)
相关新闻
- 鲁东大学徐文龙、吴楠 Ind. Crop. Prod.:可调水凝胶无土栽培基质对大豆幼苗和根系生长的影响 2025-05-24
- 华南理工大学殷盼超教授团队 Nano Lett.:钼蓝纳米环尺寸精确调控微观机制 2024-12-02
- 西安交大成一龙课题组《Sci. Adv.》: 分子结构精确调控构建高分子湿粘接剂 2023-06-06
- “高分子流体动力学”科学与技术前沿论坛在长春举行 2018-09-14
