皮肤是动物感知外界的重要窗口。仿生电子皮肤能让机器人感受外界的温度、湿度、压力等信息,为机器人领域带来了全新的机遇。事实上,皮肤包含了内部的皮肤组织和表面皮肤附属器两部分。皮肤组织中布满了各种物理和化学的传感器,是以往电子皮肤主要模仿的对象。然而,现有电子皮肤往往忽视了皮肤附属器的作用。皮肤附属器,比如鳞片、毛发、指甲等,承担了各种特异化的功能,对于动物的捕食和运动等都非常重要。其中一类皮肤附属器主要承担粘附调控功能,比如壁虎树蛙的粘附纤毛,章鱼的吸盘等。

图1.具备感知功能的皮肤组织和具有粘附功能的皮肤附属器例子
以往有工作试图把智能粘附集成到电子皮肤系统中。然而,在传统的粘附设计中,最强粘附和最弱粘附相互耦合:当最强粘附增加的时候,其最弱粘附也随之增加。因此,同一种粘附设计没法同时用于需要强粘附和避免粘附的场景。
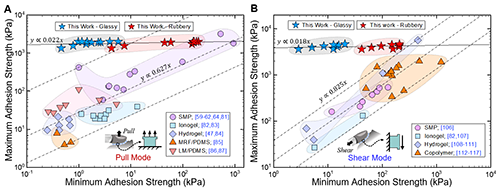
图2. 智能粘附的最强和最弱粘附统计。(A)拉开模式下的数据统计。(B)剪切模式下的数据统计。
机器人的作业环境多种多样。在有些场景下,需要粘附作用来协助,比如用于大型、重型和脆弱物体的操纵。没有粘附的情况下,机器人很难依靠摩擦力或者机械夹取方式来抓取比机械手大很多的物体。然而,有了强粘附的协助,抓取各种大小的物体都不再是问题。相反,在另外一些场景下,粘附却需要尽量避免:比如用于表面形貌检测时,粘附作用会在测量中导致噪音,影响测量精度;用于非常轻巧的物体抓取时,残余粘附会把物体粘住,无法顺利释放。
由于智能粘附中的强弱粘附耦合问题,智能粘附在电子皮肤中的集成和应用一直受到限制。
针对这个挑战,新加坡南洋理工大学校长讲席教授夏焜(新加坡南洋理工大学前副校长)、清华大学讲席教授高华健院士(清华大学力学与工程交叉院院长)、新加坡南洋理工大学王一凡教授和湖南湘潭大学王秀锋教授近日在Science Advances上发表文章,利用形状记忆聚合物相变过程中的模量调控效应、形状锁存效应和形状记忆效应,提出了按需粘附和按需脱粘的粘附电子皮肤设计,实现了最强和最弱粘附的解耦,达到了kPa级到MPa的粘附调控范围。
相关研究以“Versatile adhesive skin enhances robotic interactions with the environment”为题发表在Science 子刊 Science Advances上。夏焜校长讲席教授、高华健院士、王一凡教授和王秀峰教授为论文共同通讯作者;南洋理工大学博士后研究员令狐昌鸿(导师高华健院士和夏焜校长讲席教授)为本文第一作者;南洋理工大学博士后研究员刘杨承毅、南洋理工大学博士杨旭东、中国计量大学特聘副教授陈舟博士为论文共同第一作者。其他作者还包括MIT的博士生冯进、新加坡国立大学博士生张以远、南洋理工大学李琰、本科生Seo Yong-Jae、李君威博士、本科生姜皓誉、苏江涛博士、方寅教授,以及北航李宇航教授和赵召博士(排名不分先后)。
该设计方法利用形状记忆聚合物(SMP)等相变材料中的橡胶态到玻璃态(R2G)转变过程中的模量变化,来控制电子皮肤的粘附状态。当SMP处于玻璃态时模量高,无法与物体表面形成良好接触,故而粘附很弱,可以用于避免粘附的场景。当SMP处于橡胶态时非常柔软,能与物体表面形成良好接触。接触后转变到玻璃态,接触变形由于形状锁存效应被冻结,从而会提供很强的R2G 粘附。当再次被加热到橡胶态后,冻结的接触在SMP的形状记忆效应驱动下被释放,导致粘附减弱。橡胶态下接触之后形成的可控强粘附可以用于需要粘附的场景。
为了验证这一概念,该工作集成了压力传感器、柔性加热器和类似树蛙粘附纤毛结构的SMP粘附结构,制备了多功能机器人粘附皮肤并集成到机械手上。作者在文中展示了配备电子皮肤的机械手在各种场景下的应用实例:无粘附状态下,SMP粘附皮肤不影响机械手进行表面纹理检测,相比之下,用硅橡胶做成的粘附皮肤则会导致粘滑现象,给测量造成噪音;当用于轻巧物体抓取操作时,比如机械手抓取毛巾来擦拭盘子,玻璃态下粘附皮肤不影响毛巾的抓取和释放,相比之下,橡胶态下粘附皮肤则会粘住毛巾,怎么也甩不掉。在粘附状态下,SMP粘附皮肤能让机械手轻松完成不同尺寸、大小和重量的物体的抓放操作。
这项研究通过解耦强弱粘附力,解决了传统智能粘附技术在不同环境下无法兼顾避免粘附和利用粘附的难题,同时显著扩展了电子皮肤系统的应用场景,为机器人在复杂环境中的灵活操作提供了新思路。通过这种方法,智能粘附技术能够更好地集成到电子皮肤中,不仅提升了机器人与环境的交互能力,还为未来智能机器人的多场景应用奠定了坚实的基础。

Fig. 1. Design and operation of SMP robotic adhesive skins.
(A) Schematic comparison between the proposed SMP adhesive skin and conventional adhesive designs. In conventional adhesives designs (left), the maximum adhesion strength is proportional to the minimum strength, characterized by large constants of proportionality in both pull and shear modes (middle). This limitation means that strong adhesives and easy detachment cannot be achieved with the same adhesive. In contrast, the proposed SMP adhesive skin features maximum and minimum adhesion strengths that are independent of each other, with very small constants of proportionality (middle). This enables a wide tunability in adhesion, allowing the adhesive skin to function effectively in scenarios where adhesion is either required or to be avoided, thereby greatly enhancing robotic interactions (right). (B) SMP adhesive skins integrated onto a robotic hand (left) to enhance its capabilities to interact with the environment. The robotic adhesive skin patches (right) are featured by arrays of hexagonal SMP adhesive fibrils on the surface and then embedded flexible heaters and pressure sensors connected by SMP adhesive interlayers. (C) Principle of on-demand attachment and detachment of a single SMP adhesive fibril on the adhesive skin. ① Minimal adhesion when contacting in the glassy phase. ② On-demand attachment when contact is established in the rubbery phase. ③ Strong DMT-like R2G adhesion after cooling into the glassy phase. ④ Switch-off of adhesion by heating up back into the rubbery phase where the SMP fibrils are detached in a JKR-like state.
参考文献:
[1]Changhong Linghu, Yangchengyi Liu, Xudong Yang, Zhou Chen, Jin Feng, Yiyuan Zhang, Yan Li, Zhao Zhao, Young-Jae Seo, Junwei Li, Haoyu Jiang, Jiangtao Su, Yin Fang, Yuhang Li, Xiufeng Wang, Yifan Wang, Huajian Gao, and K. Jimmy Hsia. Versatile adhesive skin enhances robotic interactions with the environment.Science Advances, 2025, 11(3): eadt4765.
[2]Changhong LINGHU, Yangchengyi Liu, Xudong Yang, Dong Li, Yee Yuan Tan, Haziq Bin Mohamed Hafiz Mohamed, Fadhli Bin Rohani Mohammad, Zihao Du, Jiangtao Su, Yan Li, Yucheng Huo, Hanyan Xu, Xiufeng Wang, Yifan Wang, Jing Yu, Huajian Gao*, K. Jimmy Hsia*.Fibrillar adhesives with unprecedented adhesion strength, switchability and scalability, National Science Review, 2024, nwae106.
[3]Changhong Linghu, Yangchengyi Liu, Yee Yuan Tan, Jun Heng Marcus Sing, Yuxuan Tang, Aiwu Zhou, Xiufeng Wang, Dong Li, Huajian Gao*, K Jimmy Hsia*. Overcoming the adhesion paradox and switchability conflict on rough surfaces with shape-memory polymers, Proceedings of the National Academy of Sciences, 2023, 120(13): e2221049120.
[4]Changhong Linghu, Xudong Yang, Yangchengyi Liu, Dong Li*, Huajian Gao*, K Jimmy Hsia*. Mechanics of shape-locking-governed R2G adhesion with shape memory polymers, Journal of the Mechanics and Physics of Solids, 2023, 170: 105091.
原文链接:https://www.science.org/doi/10.1126/sciadv.adt4765
- 美科学家研制超薄电路:似刺青可粘皮肤上 2011-08-17
