宁波材料所茅东升/陈海明团队 Mater. Horiz.: 微相锁定自增强离子弹性体
基于离子液体或离子盐溶胀的聚合物网络,凭借其优异的离子电导率、易于制造、非挥发性、抗冻性和透明性,已成为开发柔性传感器、致动器、人造肌肉和离子电子学的热门选择。然而,在非化学交联体系中,离子液体或离子盐通常充当增塑剂,往往伴随较差的机械强度和模量。相比之下,密集的共价交联网络能够提供极高的强度和模量,但这往往牺牲了长程拉伸性。此外,在超分子离子导电弹性体中,离子与强极性位点的相互作用破坏了分子链的堆积,阻止了极性片段的聚集。在变形过程中,这种动态相互作用会导致明显的链滑移,进而使传感信号失真。因此,开发出既具长期拉伸性又具特殊弹性的柔软且坚固的离子导电弹性体柔性传感器,成为当前亟待解决的关键科学挑战。
中国科学院宁波材料技术与工程研究所陈海明副研究员和茅东升研究员团队基于微相锁定策略设计了一种自增强离子导电弹性体(SRICE),以满足对先进性能的要求。为了增强软段与离子之间的相互作用,选择了大体积且与软段结合能力强的离子液体1-乙基-3-甲基咪唑啉双(三氟甲基磺酰基)亚胺([EMIM]+[TFSI]-),确保其有效留存在软段中。此外,采用了能够发生应变诱导结晶的聚四氢呋喃(PTMEG)和结构规整的4,4''-二异氰酸酯二环己基甲烷(HMDI),通过应变诱导结晶实现自增强。规则结构的己二酸二肼(ADH)作为扩链剂,进一步增强了硬段之间的结合力。通过将合成的聚氨酯(PU)溶液从80℃冷却至25℃的优先组装策略(PAS),促进硬段氢键的形成,优化微相分离结构,确保后续引入的离子被锁定在软相中。所制备的SRICE呈现出软/硬双相分离的微观结构。2024年10月16日,该项研究以“Empowering Soft Conductive Elastomers with Self-Reinforcement and Remarkable Resilience via Phase-Locking Ions”为题发表在《Materials Horizons》。文章的第一作者是宁波材料所2021级硕士研究生陆凯,陈海明副研究员为唯一通讯作者。
【SRICE的分子设计与结构表征】

图1 SRICE的分子设计和合成
在二维小角X射线散射 (SAXS) 图中,SRICE 的软/硬双相分离微观结构得到了证实,散射中心之间的平均距离为 9.2~9.4 nm(图2a)。原子力显微镜 (AFM) 也验证了这种相分离形态(图2b)。傅立叶变换红外光谱(图2c)中,软段的 C-O-C 和 C-H 伸缩振动峰均发生了蓝移,表明醚键和咪唑环之间形成了氢键。令人意外的是,在含有 5 wt% 和 10 wt% 离子液体的 SRICE-5 和 SRICE-10 的 DSC 谱图中,发现 PTMEG 存在冷结晶现象(图2d)。这是由于在[EMIM]+[TFSI]- 的诱导下,PTMEG 片段局部膨胀,促进了 PTMEG 的构象调整,从而促进了结晶(图2e)。然而,随着[EMIM]+[TFSI]- 浓度的增加,离子与 PTMEG 的相互作用位点增多,亲和力增强,抑制了 PTMEG 的结晶。温度变化下的流变特性(图2f)进一步证实了硬段的良好组装。存储模量和损耗模量的交点通常被视为从弹性主导向粘性主导过渡的临界点,随着离子含量增加,材料的粘性特征增强。通过阿伦尼乌斯方程计算段弛豫的活化能(图2g)进一步表明硬段的组装不受离子的影响。此外,我们利用分子动力学 (MD) 中的 Forcite 模块计算了[EMIM]+[TFSI]- 在聚氨酯弹性体中的扩散系数(图2h),结果显示[EMIM]+[TFSI]- 含量越高,扩散速度越快。
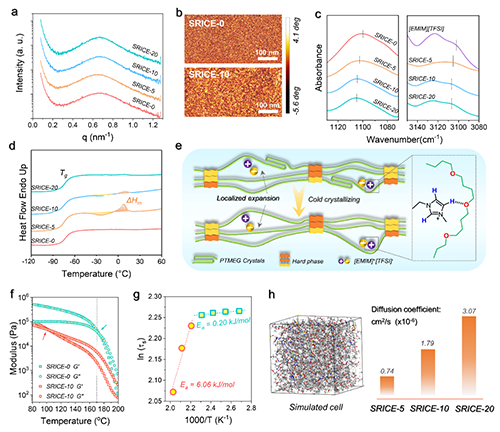
图2 SRICE的结构表征
【SRICE的机械性能】
为了研究SRICE的机械性能,在图3a中展示了SRICE的典型工程应力-应变曲线,图3b中详细列出了相应的强度和杨氏模量。值得注意的是,所有SRICE均表现出相似的机械行为(图3a),尤其是在初始变形阶段,杨氏模量随离子液体含量的变化仅有略微下降。当应变超过400%时,所有SRICE均出现明显的应变硬化行为。原位广角X射线散射(WAXS)证实,应变强化源于PTMEG的应变诱导结晶,与PTMEG的(020)晶面对应的衍射峰的出现支持了这一结论(图3c-d)。其卓越的韧性超过了大多数已报道的离子导电弹性体(图3e-f)。
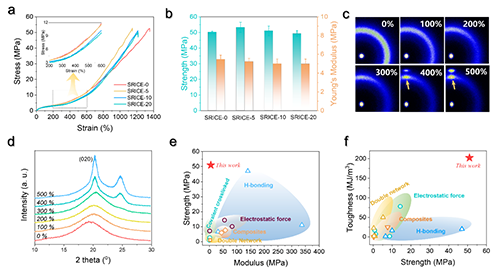
图3 SRICE的机械性能
【SRICE的传感特性】
在柔性传感器中,灵敏度是一个关键指标。图4a展示了SRICE-10的循环应力-应变曲线。图4b显示了SRICE-0和SRICE-10的η恢复和滞后比。可以明显看出,SRICE-10和SRICE-0在η恢复和滞后比方面表现出相似的趋势。随着最大应变(εmax)的增大,滞后比也增加,这是因为SRICE-0和SRICE-10中的硬段相具有相似的堆积结构。值得注意的是,如图4c所示,SRICE-10的η恢复值超过了大多数文献报道的弹性体性能。据作者所知,51.0MPa的强度和92.9%的回弹效率是超分子离子导电弹性体中同时达到的最高纪录。如图4d所示,通过监测循环拉伸过程中的电阻变化(ΔR/R0),进一步证明了这种材料具有出色的弹性表现。此外,图4e显示了SRICE-10在承受不同重量哑铃负载时产生的相应ΔR/R0值。这表明该材料在应变和ΔR/R0电阻传感恢复能力方面表现出极强的重复加载循环能力。因此,SRICE具有无色透明、适当模量、出色强度、韧性和灵敏的应变电阻响应,在高性能柔性传感器中,SRICE展现出良好的应用潜力。
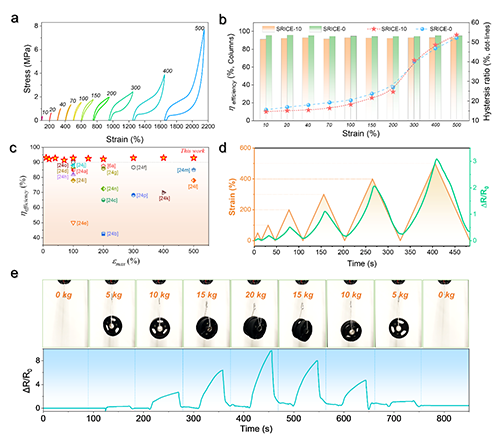
图4 SRICE的应变和应力传感灵敏度和稳定性。
【基于SRICE的2D位置传感器】
因此,SRICE-10 可直接用作无栅格位置识别传感器(图 5a)。SRICE-10 的内部元件可视为从触摸位置到两端的两个电阻。两侧的感应电压与电阻成反比,这些电信号可以转换为位置坐标。感应电压与触摸位置到两端的距离成反比。例如,触摸 1# 位置时,V1 > V2;相反,触摸另一端时,V1 < V2。触摸 3# 位置时,V1 和 V2 的值相近,表明识别到了 SRICE-10 条带的中心(图 5c)。图 5d 展示了在条带上从左到右或从右到左连续移动时 V1 和 V2 的变化。随着 V2 的增加,V1 逐渐减小,这表明从左向右滑动,反之亦然。因此,如图 5d 所示,通过两电压比值的变化,可以直观地反映触摸位置。此外,由于 SRICE-10 具有良好的拉伸性,它甚至可以在拉伸后识别位置。施加 30% 和 60% 的拉伸后,显示出与未拉伸试样相似的灵敏度(图 5e),证实了基于三阻触控传感技术的无栅格位置识别传感器不受变形影响。如图 5f 所示,5×5 的网格仅作为参考绘制在底板上,网格本身没有相互连接的电极,但仍能在一盘完整的围棋比赛中准确确定棋子的位置。显然,这些柔软、坚韧、有弹性且反应灵敏的离子导电弹性体的开发为人机交互技术的进步带来了曙光。
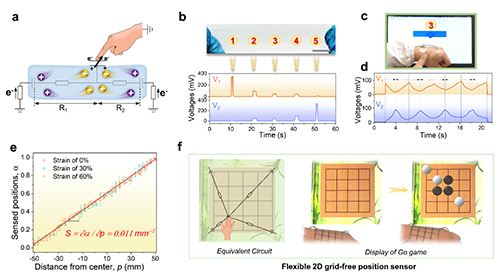
图5 SRICE无栅位置识别传感器的应用
【小结】
在这项研究中,建立了软段与离子之间的适当相互作用,并采用了直接的优先装配策略来优化聚氨酯的微相分离结构,从而有效将引入的离子液体截留在软相中。PTMEG 片段在应变诱导下结晶所产生的自加强作用,使得离子导电弹性体具有约 51.0 MPa的出色强度和约 1200% 的断裂伸长率。保持不受干扰的物理交联网络确保了约 92.9% 的出色瞬时弹性效率。此外,软锁相离子的存在也有助于降低刚性。离子与软段之间的适当相互作用还赋予了其显著的导电性能,使其能够直接用作基于三阻触摸传感机制的无网格位置识别传感器。凭借合适的模量、出色的强度、韧性和灵敏的抗应变反应,无色透明的 SRICE 还可用作人造肌肉,为柔性设备的开发带来了巨大前景。
该工作得到了国家自然科学基金(52103014)、宁波市自然科学基金(2023J407、2023S054)、浙江省领军型创新创业团队引进计划(2021R01005)和宁波市甬江人才引进计划(2021A-045-C)的支持。
原文链接:https://pubs.rsc.org/en/content/articlelanding/2024/mh/d4mh01003e
