加州理工学院高伟教授团队 Chem. Rev. 综述: 可穿戴和植入式软体机器人
2024-10-15 来源:高分子科技
过去几十年来,机器人技术取得了长足发展,人机交互的安全性问题也日益凸显。软体机器人采用柔韧性和柔顺性与皮肤或肌肉组织相似的材料,可以通过变形吸收碰撞产生的大部分能量,尤其适用于可穿戴和植入式应用。对于这类应用,器件的规模和侵入性往往是设计的关键。一般而言,较小的规模可以带来更好的便携性,但会增加设计、制造、控制的复杂性,并受到电源限制。较低的侵入性可以提高舒适度并降低手术的复杂性和风险,但对器件的尺寸及其材料的生物相容性提出了更高的要求。因此,开发更先进的可穿戴和植入式软体机器人在很大程度上依赖于设计、制造、控制、电源和材料等方面的创新。
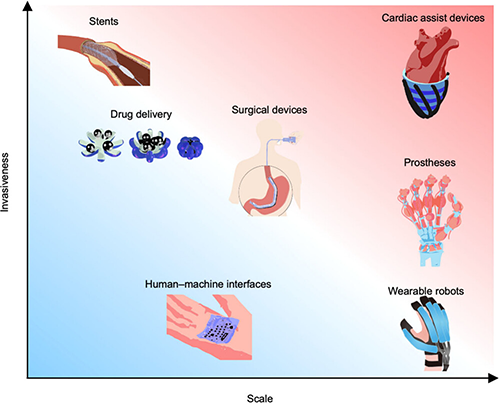
图1 比较了不同类型的可穿戴和植入式软体机器人在规模和侵入性方面的差异
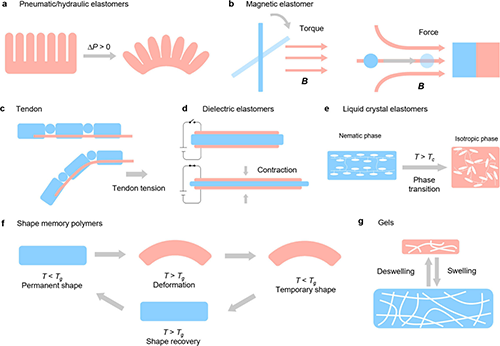
图2 按材料类型分类的软体机器人驱动机制
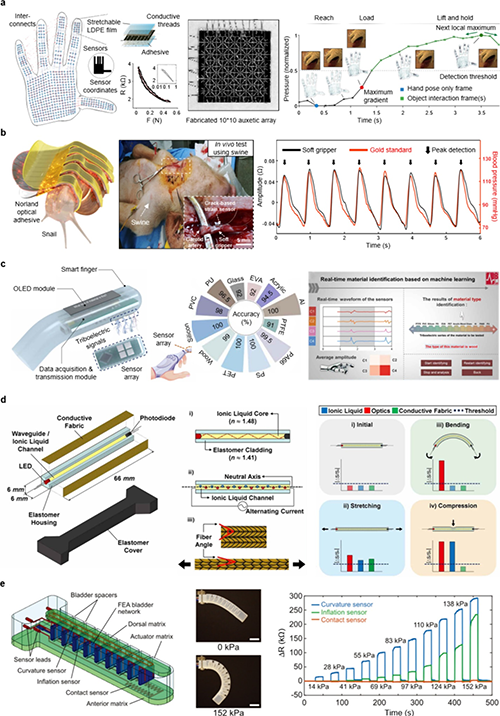
图3 软体机器人的外部传感和本体传感
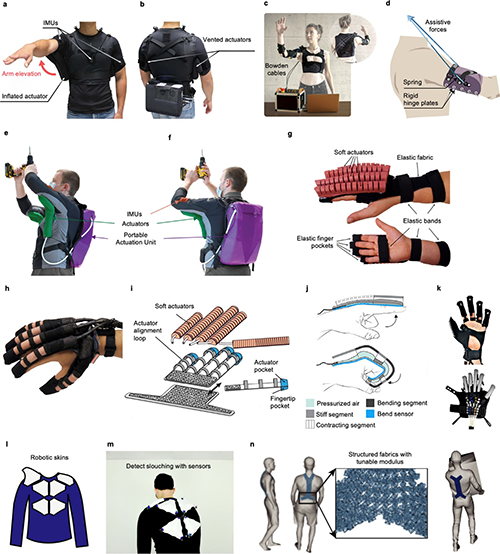
图4 上身可穿戴软体机器人
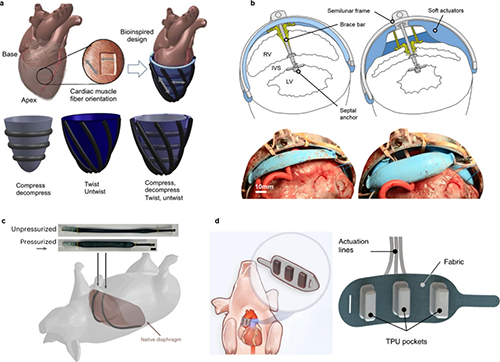
图5 用于人造器官的软体机器人
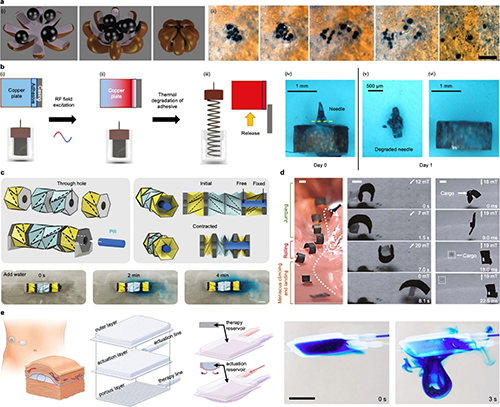
图6 外部刺激驱动的无线植入式软体机器人
得益于驱动机制、材料科学和制造技术的持续创新,可穿戴和植入式软体机器人正迅速发展。未来的软体机器人将通过新型驱动器、生物兼容材料和先进制造技术,增强多功能性和智能性,能够自主运行、适应复杂环境并执行复杂任务。实现这些潜力需克服重大挑战,跨学科合作至关重要。
课题组网址:https://www.gao.caltech.edu/
原文链接: https://pubs.acs.org/doi/10.1021/acs.chemrev.4c00513
版权与免责声明:本网页的内容由中国聚合物网收集互联网上发布的信息整理获得。目的在于传递信息及分享,并不意味着赞同其观点或证实其真实性,也不构成其他建议。仅提供交流平台,不为其版权负责。如涉及侵权,请联系我们及时修改或删除。邮箱:info@polymer.cn。未经本网同意不得全文转载、摘编或利用其它方式使用上述作品。
(责任编辑:xu)
相关新闻
- 哈工大(深圳)何思斯团队 AM:高性能全聚合物水系准固态纤维电池 - 为透气可穿戴设备提供可靠能源 2026-06-05
- 中山大学付俊教授团队 AFM 综述:超薄可穿戴柔性电子器件及其智能健康监测应用研究进展 2026-05-30
- 武汉大学吴伟教授团队 AFM:用于下一代自适应可穿戴设备的全印刷温度-压力双模传感电子织物 2026-04-22
- 天津大学张雷、杨静教授《Biosens. Bioelectron.》:类组织植入式传感器 - 用于异常膀胱活动实时监测 2025-08-01
- 北京大学邵元龙《Adv. Mater.》综述:用于组织电子设备接口的生物材料基纤维状植入式探针 2025-06-27
- 北理工沈国震教授/李腊副教授、湖南工大许建雄教授 Adv. Mater.: 可植入式无线水凝胶超级电容器实现双向神经调控 2025-04-24
- UCLA贺曦敏团队 Sci. Adv. 封面:球形无系留自维持滚动机器人 2026-05-01
