摩擦电传感设备依靠接触起电和静电感应的耦合效应,能够将外部施加的机械刺激转化为电信号,从而简化触觉信息的获取和量化。然而,传统弹性摩擦电材料(聚二甲基硅氧烷、热塑性聚氨酯、硅橡胶等)的杨氏模量过高,与人体组织之间固有的机械失配为可穿戴触觉传感设备在人机交互中的应用带来了极大挑战。模量的高度失配和极低的粘附性使其难以与人体和机器人形成顺应性的共形接触和稳定的界面连接,损害了可穿戴触觉传感设备的运行稳定性和传感信号的保真传输,严重限制了柔性电子技术的进一步发展。
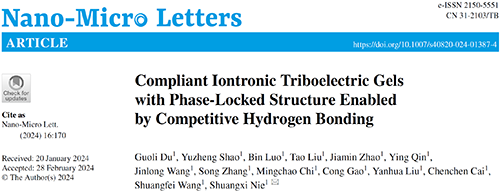
近日,王双飞院士团队聂双喜教授课题组受人体皮下组织的天然两相结构启发,提出了通过竞争性氢键诱导纤维素再生的相分离策略,实现了一种具有锁相结构的皮肤顺应性摩擦电弹性体。利用聚合物-溶剂-非溶剂相互作用构建竞争性氢键体系,以触发相分离。由此制备的摩擦电弹性体具有双连续软-硬相交替结构,其较低的杨氏模量(6.8-281.9 kPa)和高拉伸性能(880%)与人体皮肤的力学性能相匹配。聚甲基丙烯酸羟乙酯(软相)和再生纤维素(硬相)中丰富的活性羟基使弹性体具备优异的摩擦正极性和自粘附性能(90°剥离强度大于70 N/m)。基于该弹性体的自供电触觉传感皮肤与工作对象保持了良好的界面和机械稳定性,极大地保证了软触觉传感信号的保真度和可靠性。该策略使柔性传感材料的类皮肤设计和广泛的力学动态可调性成为可能,为其从软机器人到可穿戴电子产品的广泛应用提供了一个通用平台。该项成果以题为“Compliant Iontronic Triboelectric Gels with Phase-Locked Structure Enabled by Competitive Hydrogen Bonding”发表在国际学术期刊《Nano-Micro Letters》上。




原文链接:https://doi.org/10.1007/s40820-024-01387-4
