传统软体机器人的运动多以一维的直线爬行为主,虽然活性材料提供了诸多驱动方式,例如温度场、磁场等,这使得新型的软体机器人可以自发的在没有外界干预的情况下完成一些简单的任务,然而复杂的操控和严苛的适用环境仍旧是阻碍以活性材料作为柔性执行器发展的拦路石。这也对相关科研团队在更优材料和更为精巧的结构设计上提出了更多的挑战。
为了探索复杂几何结构的温度场驱动软体机器人的运动模式,近日,一种具有周期性运动轨迹的螺旋环状结构给以液晶弹性体为基底的软体机器人设计提供了新的参考。北卡罗莱纳州立大学尹杰团队制造出一种螺旋带状液晶弹性体,若将该带状螺旋结构首尾相连,置于发热平板上时,其将展现出三种相互关联的耦合运动(图1):首先是自里向外的滚动,其次是绕环转动,最后是以环外某一点为圆心的转动。后两种运动类似于星体的自转和公转,相较于目前已有的液晶弹性体机器人,展现出特有的周期性运动,这也为该机器人的运动轨迹的可预测性提供了保证。这种设计不仅得益于液晶弹性体本身的热驱动模式,使得其可以吸收温度场中的热量并且自发地转化为动能,而且同样得益于独特的结构设计,使其的运动方式(例如滚动的速度、自转和公转的周期等)在设计阶段就可以预先调节,按需进行制造。
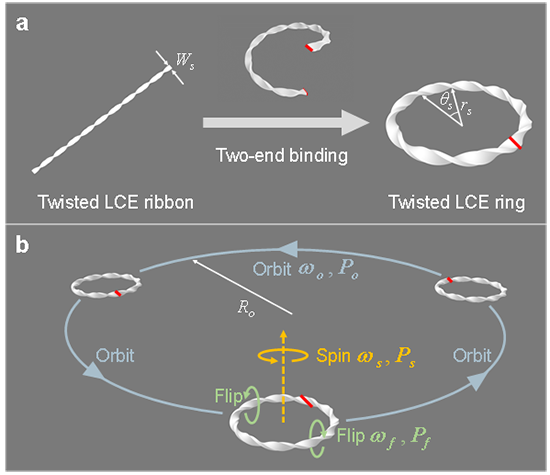
图1:基于带状螺旋体的环状拓扑结构设计及其运动的描述
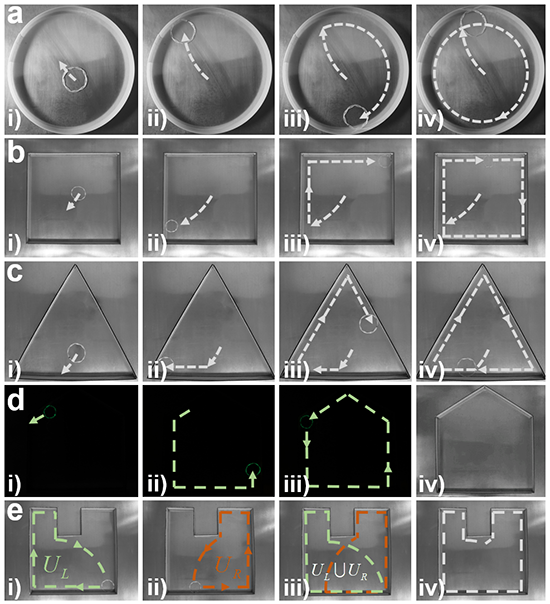
图2:螺旋环状软体机器人描绘封闭空间的边界形状
然而在自然界中,工作条件往往更加苛刻,封闭空间的形状也更加不规则(例如凹形状),为了测试该软体机器人的工作情况,课题组设计了相关实验,例如在完全黑暗的环境下通过荧光涂料,使得在黑暗中亦可追踪其轨迹;另外,对于凹形状,虽然单个机器人只能覆盖部分的空间,但是通过在制造过程中改变螺旋的手性,制作出不同的螺旋环状机器人,这样使用集群,就可以将部分的形状通过求并集的方式描绘出完整的形状。

图3:带有“缺陷”的螺旋环状软体机器人受力的非对称性
论文信息: F. Qi, Y. Li, Y. Hong, Y. Zhao, H. Qing, J. Yin, “Defected twisted ring topology for autonomous periodic flip-spin-orbit soft robot”, PNAS, 121, e2312680121, (2024).
https://doi.org/10.1073/pnas.2312680121
- 南开大学刘遵峰合作团队 AM:破解液晶弹性体纤维力学-驱动-阻尼三元矛盾→揭示全新连续液晶相变过程 2026-07-10
- 斯坦福赵芮可教授团队 Nat. Commun.: 具有时空可编程表面褶皱的光热驱动液晶弹性体多功能平台用于信息编码与物体操控 2026-07-01
- 东华大学丁彬/李召岭 AFM:液晶纺丝制备高强韧纤维素离子凝胶纤维 2026-07-01
- 北化曹鹏飞教授、田明教授 Adv. Mater.:疏溶剂弹性体涂层“筛分”离子构筑双层SEI助力低温电池超稳循环 2026-07-04
- 大阪大学肖淳林、Yuichiro Kobayashi、Hiroyasu Yamaguchi团队 Nat. Commun.:多重能量耗散途径按顺序激活实现弹性体增韧 2026-07-03
- 南开大学关英/天工大张拥军 AFM:综合性能优异的离子导电弹性体 2026-06-29
- 北航罗斯达教授 Sci. Adv.:激光编程软执行器-解锁仿生软体机器人变形定制新方法 2026-07-04
