武汉大学常春雨/江南大学陈敬华课题组 CEJ: 利用磁场诱导制备非对称水凝胶纤维用于强韧的可编程形变驱动器
2023-11-11 来源:高分子科技
水凝胶驱动器可以响应外部刺激发生形变,因此在软机器人、智能织物和人工肌肉等领域具有巨大潜力。良好的机械性能、快速响应速度和复杂的形状变化是水凝胶驱动器在实际应用中的关键。
近期,武汉大学常春雨教授课题组和江南大学陈敬华教授课题组采用磁场诱导策略制备了一种可编程的双物理交联水凝胶纤维。在外部(湿度或溶剂)刺激下,水凝胶纤维表现出优异的机械强度(28.9 MPa)和快速响应速度(3.2°·min-1·mm-1)。并且通过设计磁铁的摆放实现了水凝胶驱动器的可编程形变,可以进一步应用于智能抓手和智能窗帘。相关工作以“Magnetic-field induced asymmetric hydrogel fibers for tough actuators with programmable deformation”为题发表在《Chemical Engineering Journal》上。
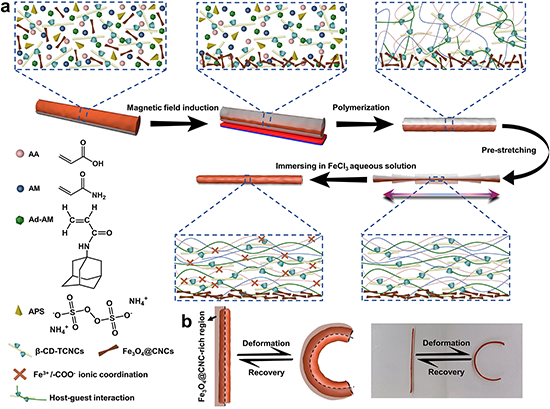
图1. 水凝胶纤维驱动器的制备和驱动示意图。
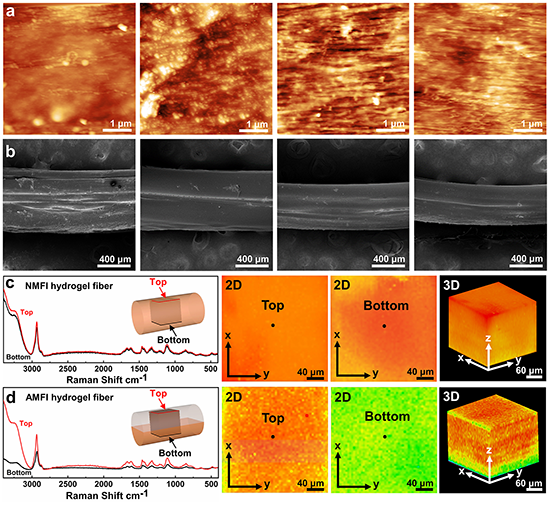
图2. 水凝胶纤维的结构表征。
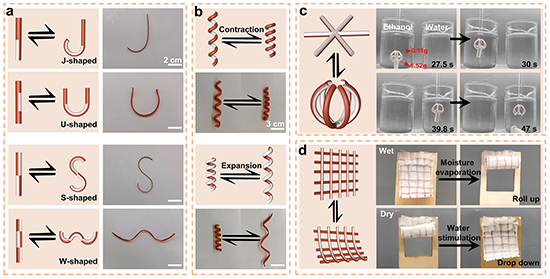
图3. 水凝胶纤维的可编程形变以及作为智能抓手和智能窗帘的应用。
全文链接:https://doi.org/10.1016/j.cej.2023.147088
版权与免责声明:中国聚合物网原创文章。刊物或媒体如需转载,请联系邮箱:info@polymer.cn,并请注明出处。
(责任编辑:xu)
相关新闻
- 深大王奔等 Adv. Sci.: 磁场诱导下的微动马达用于骨损伤修复 2025-07-04
- 浙江大学郑强、吴子良团队 Angew:旋转磁场辅助制备具有多响应性、复杂取向结构的纳米复合水凝胶 2022-06-27
- 浙江大学赵骞教授、浙江省肿瘤医院张宇华团队 Adv. Mater.:在可编程的自发变形水凝胶方面取得进展 2026-07-12
- 斯坦福赵芮可教授团队 Nat. Commun.: 具有时空可编程表面褶皱的光热驱动液晶弹性体多功能平台用于信息编码与物体操控 2026-07-01
- 像拧旋钮一样调控隐身频段!东南大学周钰明/何曼团队造出“可编程”智能气凝胶,登上 AFM 2026-05-24
- 上科大凌盛杰《Adv. Funct. Mater.》:双物理交联丝素离子弹性体构建运动和触觉感受器 2023-04-08
- 青科大王文嫔/李志波教授团队 JMCA: 在自修复聚硅氧烷弹性体方面取得新进展 2022-11-01
