近年来,柔性电子皮肤因在健康监测、人机交互、智能机器人等领域的巨大应用潜力而备受关注。作为模仿人类皮肤的电子器件,柔性电子皮肤被期望具有与皮肤类似的感知及识别功能。目前,柔性传感技术的快速发展已实现了柔性电子皮肤对触觉强度(即压力)的准确检测;然而,在智能机器人及人造假肢等领域备受期待的三维表面形貌的定量识别,对于当前的柔性电子皮肤来说仍是一个挑战。同时,柔性电子皮肤也被期望具有传输大量人造信息的能力且能适用于多样化的实际场景,以满足智能化时代高效人机交互及多功能应用的需求。

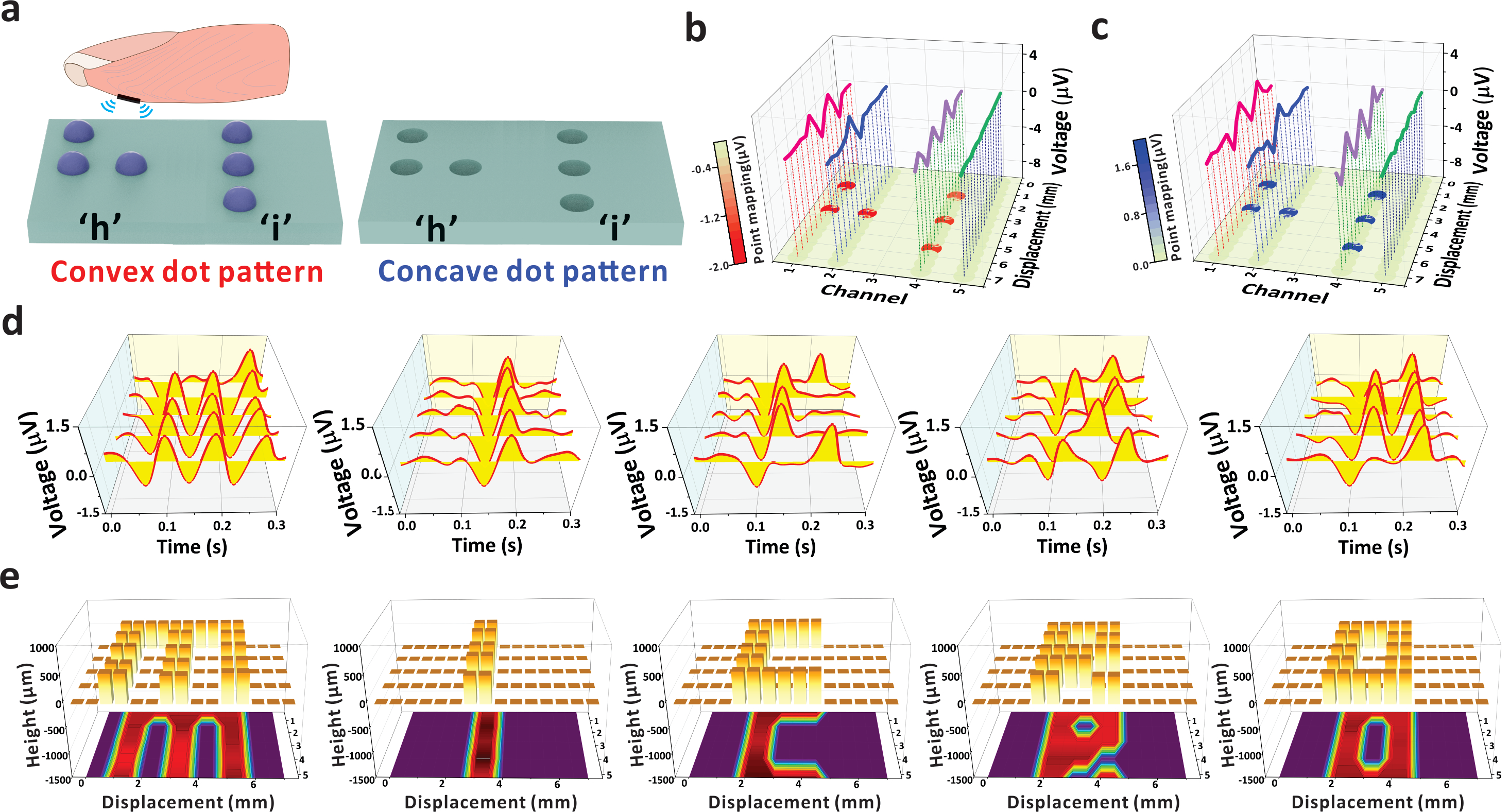
图2. a) 柔性电子皮肤用于识别基于凸起及凹陷点阵的盲文信息示意图;b-c) 电子皮肤对基于凸起(b)和凹陷(c)点阵构成的盲文字母“h”和“i”的动态响应;d) 电子皮肤对浮雕字母“M”、”I”、”C”、”R”和”O”的动态响应;e)相应字母的形貌重塑结果。
优化后的电子皮肤在竖直方向上具有0.1-1.2 mm的宽检测范围,因此不仅可以识别毫米尺度的盲文信息,为装配假肢的盲人或视力障碍群体提供便利(图2a-c),还可以通过触觉感知识别并重塑微米尺度上的浮雕字母信息(图2d-e),为解决传统光传感智能机器人无法在低可视度条件下有效识别形貌的限制提供更多可能。由于该电子皮肤亦具有压力传感能力,其也可作为穿戴器件用于健康监测(包括呼吸状态识别、关节弯曲感应、动作行为捕捉等)。此外,通过定制不同区域MMCA的反向磁矩排列,触摸电子皮肤的不同区域将产生相反的磁场变化及电压波形(图3a)。组合触摸位置、顺序、次数等参数,单个电子皮肤即可输出多种不同电压波形作为信息编码,用于大容量的指令传输(图3b)和高效的水下摩斯密码通讯(图3c-e)。这不仅避免了多器件集成的需求,也有效降低了信息写入/读出的复杂性。此外,将输出的电压波形作为信息编码不依赖于触摸强度的变化,因此可有效保证信息传输的准确性。

图3. a) 通过触摸具有反向磁矩的MMCA产生多种信号作为信息编码的原理;b)作为单字节、双字节以及三字节编码指令的实时电压波形;c) 水下智能通信的示意图;d-e) 摩斯密码信息“SOS”(d)和“OK”(e)的实时电压波形。
原文链接:https://onlinelibrary.wiley.com/doi/10.1002/adfm.202208120
- 中山大学吴进等 AFM:基于坚韧可降解皮革水凝胶的自供电、超灵敏柔性H2S气体传感器 2026-06-05
- 武汉大学吕昂团队 AFM:相分离增强的纤维素/海藻酸压离子水凝胶用于高灵敏自供电传感 2026-04-13
- 华南理工大学黄飞团队 Nat. Commun.:基于p-n导电聚合物的多功能集成电致变色器件 - 从自供电智能窗到微型光谱仪 2025-12-25
- 苏大张晓宏教授团队招聘博士后 - 人形机器人电子皮肤与多模态触觉感知方向 2026-06-17
- 浙江大学IBE团队蓝玲怡研究员 Nat. Commun.:仿生凝胶基电子皮肤压力传感器实现抓取过程中水果硬度的精准感知 2026-05-31
- 苏州大学张晓宏教授课题组招聘柔性电子器件方向博士后 2026-05-06
- 厦门大学廖新勤团队 Nature子刊: 柔性电子围巾读懂无声语言 2026-06-06
