自然界中,哺乳类动物,鱼类,蛙类,昆虫类以及细菌类等生物经过了几万年的演化形成了一套特殊的生理结构,其展现的抗冻,抗干燥,自适应等特征能够保障他们在复杂多变和极端环境下生存。而对于人类,皮肤作为人体最大的器官通常充当人体内部物理,温度和湿度保护屏障,并控制着身体与外界的水分交换。同时皮肤中包含大量的神经感知单元可以用来感受诸如压力,形变,温度,湿度和疼痛等来自外部环境的刺激。皮肤的这些功能是通过其内部相应的复杂结构来实现的。例如,其高度抗形变的胶原蛋白和弹性纤维网络用于承受物理变形;保湿物质如吡咯烷酮羧酸(pyrrolidone carboxylic acid) 用于锁水;皮下脂肪细胞用于抵御寒冷;多种感知神经元如力学感受器,温觉感受器及疼痛感受器,可将外部刺激转化成钾钠离子的移动和动作电位在神经细胞中的传递。皮肤的这些结构特征为我们设计新型可拉伸电子带来了启发。通过精巧地设计并组合相关电子元器件及弹性体材料,研究人员已成功开发出诸如电子皮肤(electronic skin)等仿人体皮肤的电子设备,并在可穿戴电子,可穿戴康复机械人和软体机器人等领域展现了巨大的应用前景。值得注意的,由于仿生皮肤和软体机器人之间优异的机械性能匹配和功能互补,目前已有大量研究精力投入到开发适合集成到软体机器人的可拉伸和可穿戴仿生电子皮肤,从而确保更安全,更智能的人机互动和环境适应性。
在这些传感材料中,以离子水凝胶为代表的软材料,由于其优异的生物兼容性,更加接近生物组织的机械和电学特性,近年来收到了大量关注。然而,目前离子水凝胶在低温环境容易结冰而失去变形能力和导电性;同时,传统离子水凝胶通常不具备良好的表面粘附能力, 从而影响其在可穿戴和软体机械人等大变形应用场景中的使用;此外,传统离子水凝胶在环境中易失水的问题也亟待解决。
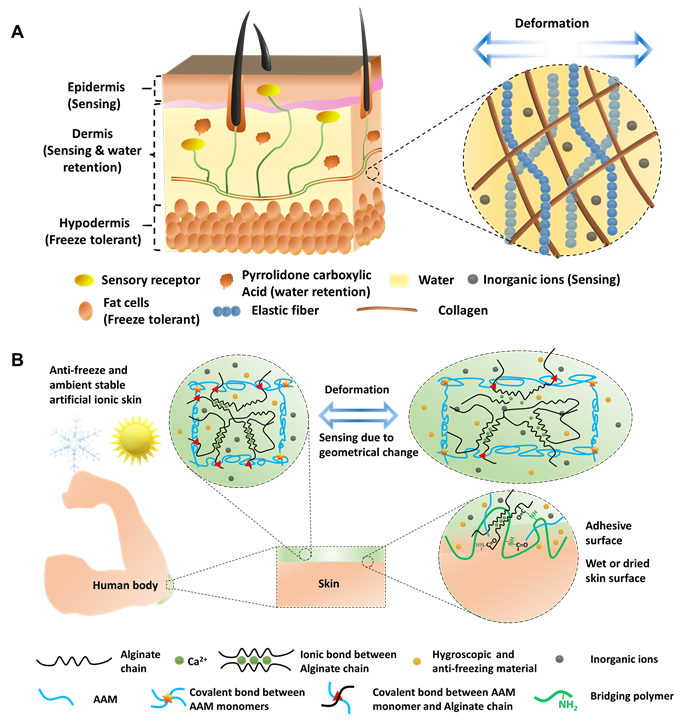
图1. 高拉伸,抗冻,环境稳定,强粘附仿生水凝胶离子皮肤(iSkin)的设计思路
基于上述问题,日前,多伦多大学机械工程系刘新宇教授团队联合麦吉尔大学机械工程系助理教授李剑宇团队,研发了一款高拉伸性、强抗冻性、环境稳定性和强表面粘附性的离子凝胶仿生皮肤 (iSkin),成果以《An Antifreezing, Ambient-Stable and Highly Stretchable Ionic Skin with Strong Surface Adhesion for Wearable Sensing and Soft Robotics》为题发表在材料领域知名期刊Advanced Functional Materials上。该离子仿生皮肤选取了经典双网络水凝胶Alginate-PAAm为模型,通过调控甘油和食盐浓度以置换水凝胶中的自由水,从而优化保湿,抗冻和导电性等综合能力。通过表面旋涂带正电的桥连聚合物和耦合剂,该水凝胶离子皮肤能和任何具有表面官能团的基底形成化学键 ,其中包括人体组织,干燥或者出汗的皮肤表面,表面功能化的涤纶纤维和弹性体等,从而实现干/湿表面的强粘贴 (图1)。这些属性赋予了iSkin在极端环境下在可穿戴传感以及软体机器人方面的应用前景。
本文研究亮点:
1. 增韧机理中,Alginate-PAAm双网络水凝胶的韧性和拉伸性对于高浓度的单价盐离子极其敏感, 本文首次发现添加甘油能够解决这一机械性能下降问题。
2. 粘贴机理中,带正电桥连聚合物和耦合剂 的粘贴性能对外界离子特别敏感, 本文首次发现甘油的添加能够维持这一化学键合能力。
3. 潜在应用中,由于水凝胶独特的表面粘贴特性和极强的抗冻能力(零下93度), 本文首次展示了极端环境下这种离子仿生皮肤在软体机器人大变形感知方面的应用前景。
实验结果:
为展示该材料的潜在应用场景,作者将iSkin粘附在羽绒服的手臂关节处并可以在低温下(-10.6摄氏度)监测手臂的弯曲与伸展(图2)。此外,作者将iSkin粘附在膝盖皮肤表面并进行30分钟的剧烈运动,展现了iSkin在皮肤干燥、出汗和动态的行动下具有的粘附性和运动感知能力(图2)。作者还利用iSkin的应变传感功能自制智能手套,通过人机交互控制机械手做出了“i love you”的手语动作 (图2)。
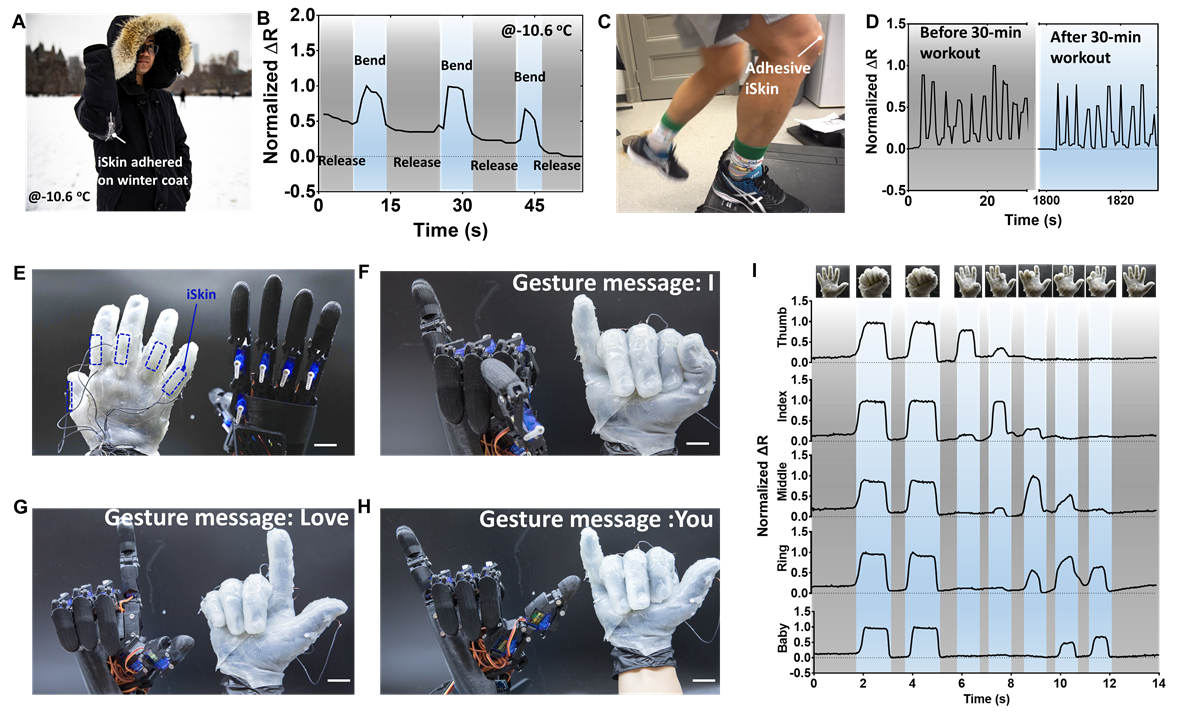
图2. iSkin应用于低温可穿戴传感和人机互动
在软体机器人方面,镶嵌了iSkin传感器的软机械器能够更准确的感知充气和变形,结合机器学习从而能够更准确的判断物品(图3)。

图3. iSkin用于软体机械手的感知。
此外,镶嵌了iSkin传感器的四足软体机器人能够在极寒环境中感知机器人的爬行或者走路状态 (图4) 。
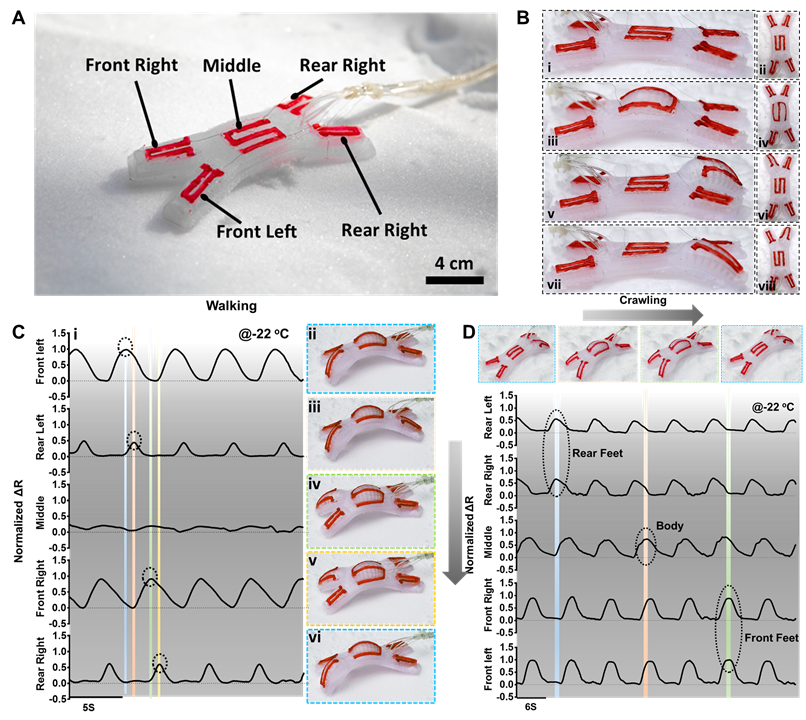
图4. iSkin用于四足软体爬行机器人的抗冻感知。
这一特点为今后在极端恶劣条件下软体机器人的闭环控制提供了可能。
论文第一作者应斌斌博士曾在麦吉尔大学和多伦多大学联合培养,目前正在麻省理工学院机械工程系从事博士后研究工作。研究方向为ingestible bioelectronics and biosensors。
多伦多大学刘新宇教授为本文通讯作者。多伦多大学刘新宇教授团队长期致力于微纳和软体机器人学、柔性电子器件、微流控器件与系统等机理研究以及应用开发。多伦多大学工程系本科生陈泽元和左润泽为本文共同第二作者。其他合作作者包括麦吉尔大学助理教授李剑宇。该研究受到了加拿大自然科学和工程研究理事会和加拿大创新基金会的资助。
论文链接:https://onlinelibrary.wiley.com/doi/10.1002/adfm.202104665
- 天津大学封伟教授团队 Macromolecules:自修复抗溶胀宽温域应用的离子导电水凝胶 2025-06-17
- 宁波材料所王荣/上海大学尹静波/宁波大学附属第一医院沈毅 Adv. Mater.:植酸诱导模量梯度离子导电水凝胶压力传感器 2025-01-20
- 天工大范杰/张青松教授、江南大学万爱兰副教授 JCIS: 基于PNIPAAm的温度响应离子导电水凝胶-用于柔性应变和温度传感 2024-10-10
- 香港城市大学胡金莲教授课题组 AHM:革新“仿生皮肤”汗液传感器 - 突破性健康监测设备的新纪元 2024-12-25
- 武培怡教授团队《Adv. Sci.》: 受揉面启发 - 定制多功能仿生皮肤 2022-03-23
- 多伦多大学刘新宇团队、麦吉尔大学李剑宇团队合作获得Materials Horizons 2020年度杰出论文奖 2021-07-19
- 中科院长春应化所韩艳春团队 AFM:弹性体基体中构建连续共轭聚合物网络 - 实现高拉伸性与高电学性能兼得 2025-03-25
