皮肤作为人体面积最大的器官,可以感知各种机械刺激,例如触摸、压力、震动等,其工作机制是人体皮肤的机械性刺激感受器(Mechanoreceptor)在受到外界机械刺激时,其细胞膜电位(Membrane Potential)随之发生变化,即机械刺激转化为生理电信号,随后通过神经传导到达大脑,形成一定的反馈和应激。这类通过细胞膜电位变化来感知外界机械刺激的传感特性,具有高效、敏感、耗能极低的特点,因此,皮肤能够敏感地感知外部刺激,并可以通过生理电信号与机械动作的反馈,进行自我保护。模仿人体皮肤的这种感知行为,设计构建传感器件,在可穿戴智能设备、人工电子皮肤以及人机交互系统的开发和应用具有重要意义。
近日,四川大学高分子研究所、高分子材料工程国家重点实验室卢灿辉教授团队、美国加州大学伯克利分校Ana Arias教授团队通过模仿人体皮肤感知器官的传感行为,设计了一类基于电位式力学传感机制、构筑了具有独特传感特性的电子皮肤,相关成果以“A Potentiometric Mechanotransduction Mechanism for Novel Electronic Skins”为题,发表在《Science Advances》上(Science Advances, 24 Jul 2020:Vol. 6, no. 30, eaba1062,DOI: 10.1126/sciadv.aba1062)。论文第一作者为吴晓东博士,四川大学卢灿辉教授和加州大学伯克利分校Ana Arias教授为共同通讯作者。
人体皮肤感知器官在受到机械刺激时,其膜电位会发生变化(图1A-C)。为了模仿这种生理传感行为,该研究采用两种电极材料(普鲁士蓝/碳材料和银/氯化银材料)和聚乙烯醇/氯化钠/甘油/水组成复合材料作为电解质,形成电势差;然后通过调整复合电解质的组成来调节本征阻抗,并在复合电解质表面构筑三维微观结构来调节电极/电解质界面性质(图2E-H),巧妙地实现了将外界机械刺激产生的变化,转化为两个电极材料之间电势差输出的变化(图1D-F),为通过模拟细胞膜电位变化,灵敏感知外界机械刺激的皮肤触感机制,研制具有电位-力学传感特性的电子皮肤奠定基础。

图1.电位式力学传感机制的设计原理和思路
作者设计并制作了三明治式和并列式两种构型的电极器件(图2A-C),其中并列式电极结构更紧凑,工艺更便捷,可通过溶液加工方法,大规模、高质量制备传感器件(图2D)。本研究研制的电位式力学传感器件对机械刺激具有良好的检测能力,既可以检测静态及缓慢变化的机械刺激(图3A,D),也可以用于监测低频动态的力学刺激(图3E),具有优异的可调性(图3B)、快速的响应/恢复速度(图3C)和良好的循环稳定性(图3F)。基于本研究提出的新型电位式力学传感机制,设计并制作了多种独特性能的传感器件,如可拉伸但应变不敏感的力学传感器(图4)、“单电极模式”电子皮肤(图5)等。

图2. 电位式力学传感器件的构型与触感特性
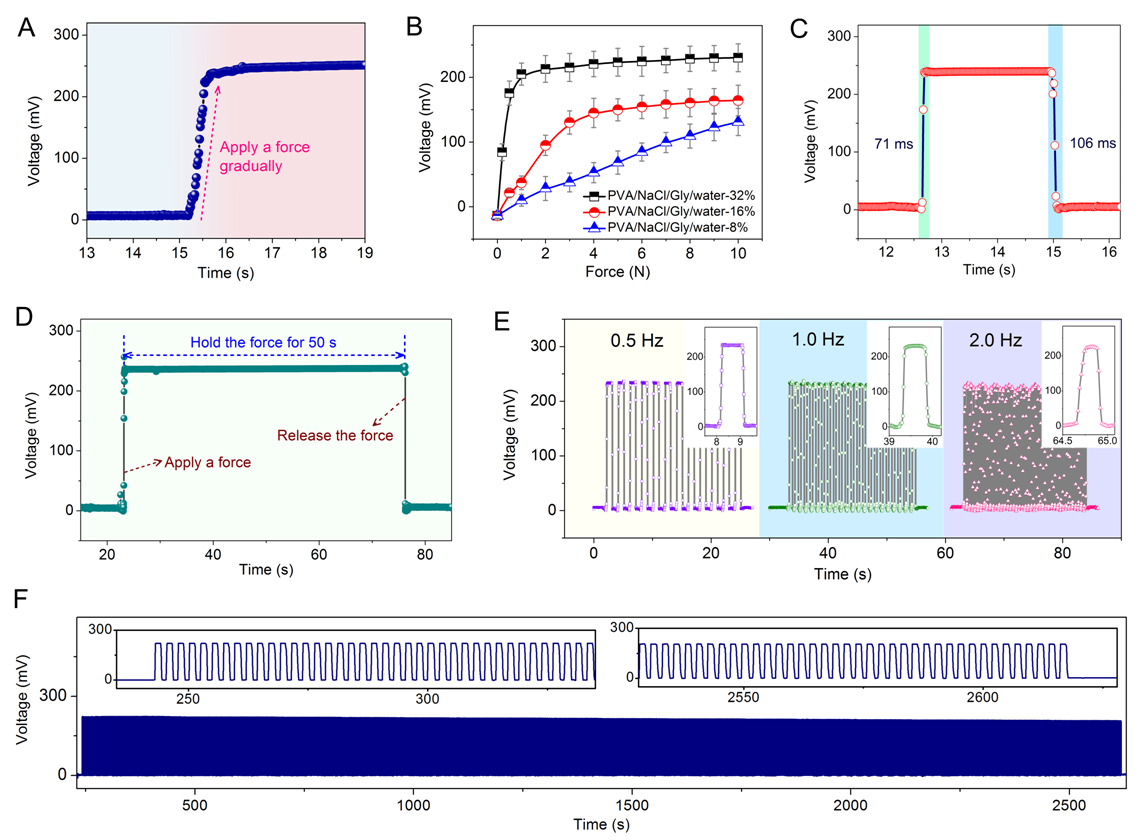
图3. 电位式力学传感器件的性能
大多数柔性传感器件在发生形变时,其本征电阻将发生显著变化,将严重干扰其传感行为。而本研究设计的电位式传感器件中,通过植入内置电阻(图4A),保证了在电势差测量过程中,传感器件本身电阻在应变下的相对变化非常小,很好解决了传统柔性传感器件形变时本征电阻变化对其传感性能影响大的难题。本研究将可拉伸导体与所研制的电位式传感器相连接(图4B),结果表明该力学传感器件具有良好的可拉伸性(图4C,达50%),在不同应变下的力学响应行为基本不变,具有优异的应变不敏感特性(图4D,F,G),完美实现了将外界压力与器件应变的去耦合,本文关于传感器设计思路和制作方法对高性能、高稳定可拉伸电位式力学传感器件的发展具有理论意义和借鉴价值。
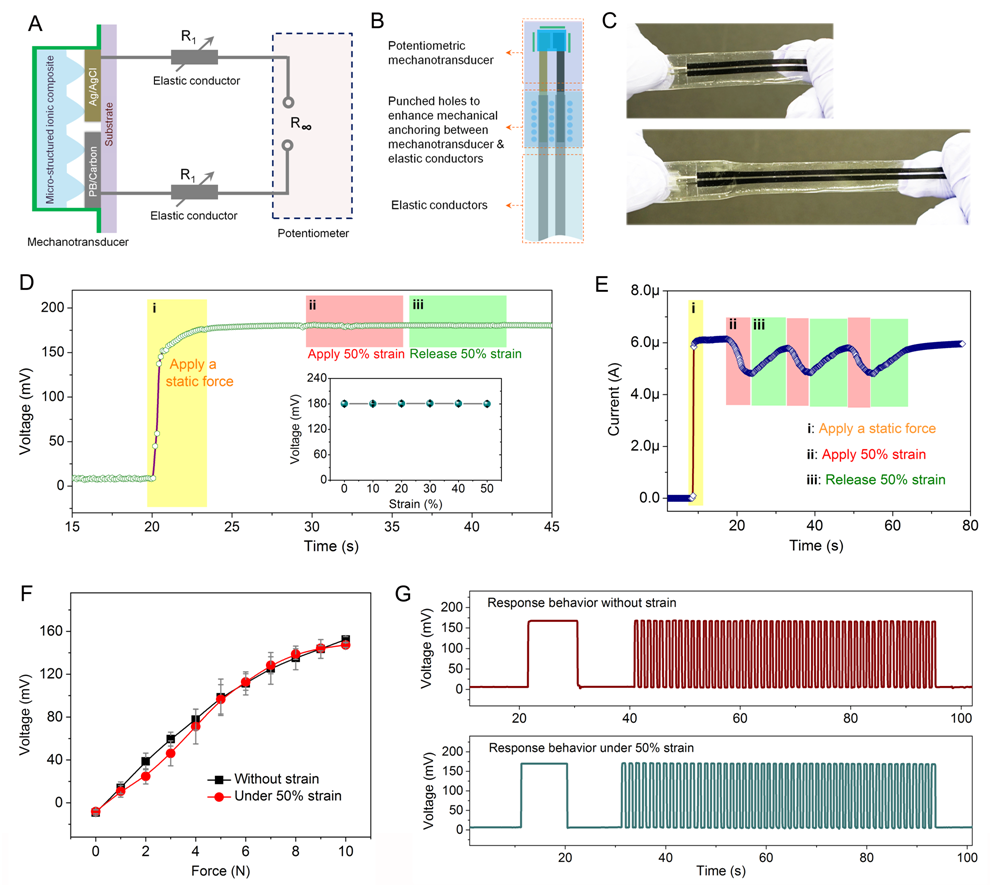
图4. 利用电位式传感机理构建的“可拉伸、应变不敏感力学传感器”性能
传统的电子皮肤的每个传感单元都是由两个或两个以上的电极构成(双电极模式),大量的电极和连接线阵列的存在限制了单位面积(体积)电子皮肤的传感元的数量和密度(图5A);采用“十字交叉”的电极模式可大幅度减少电极以及连接线数量(图5B),但是,这种模式传感元只能逐一操作,难以获得高采样频率的传感器件。针对上述问题,作者创新性地提出利用电位式传感机理来构筑“单电极模式”的电子皮肤(图5C)。具体工作机理是:在电势差测量过程中,只需要使用一个电极作为共用的参比电极,然后测量其它传感电极相对该参比电极的电势差,在电势差测量过程中几乎没有电流通过电路系统,因此所有的传感电极可以同时工作,而不会相互干扰。该种“单电极模式”电子皮肤可大幅度减少电极和连接线数量,同时简化了连接线的排布方式,大幅度提高了电子皮肤的传感元数量及密度;更重要的是,系统中所有传感电极(传感元)可以同时工作,极大提高了电子皮肤的采样频率。本研究开发的电位式机械传感器件可用于应力、位置、轮廓的静态或动态监测(图5D-H),拓展了高性能人工电子皮肤的研究思路,易于实用化,应用前景广阔。
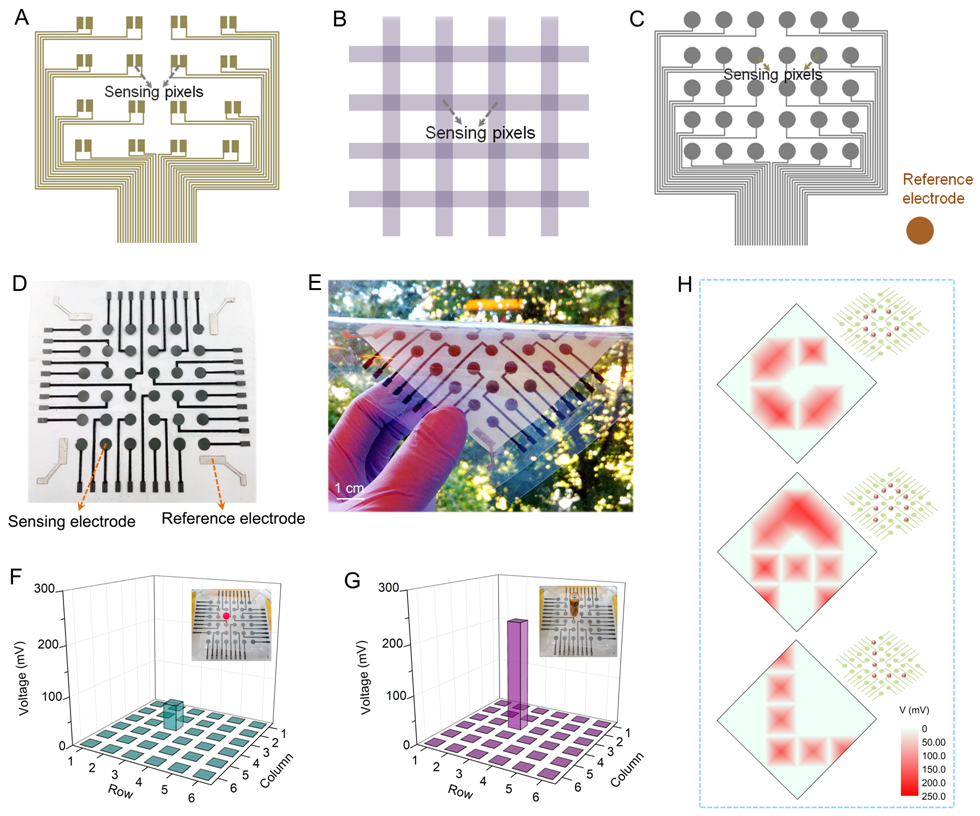
图5. 基于电位式传感机理构筑“单电极模式”电子皮肤及传感性能
原文链接:https://advances.sciencemag.org/content/6/30/eaba1062
第一作者吴晓东博士简介:
第一作者吴晓东博士(2019年博士研究生毕业于四川大学高分子研究所、高分子材料工程国家重点实验室,导师为卢灿辉教授),目前为加州大学伯克利分校博士后。吴晓东博士在研究生学习期间主要围绕可穿戴智能器件和人工电子皮肤的仿生设计、规模化制备及应用开展系列研究工作,如结合筛网模板法和电极打印技术实现高性能压力传感器件的大面积规模化制备(Adv. Electron. Mater. 2020, 6, 1901310);通过模仿蜘蛛感知器官的微裂纹结构开发了高灵敏、宽量程的压力传感器件(Adv. Funct. Mater. 2016, 26, 6246);通过独特导电微纳结构的设计实现了多种应变传感器件的制备(ACS AMI 2017, 9, 23007; ACS AMI 2016, 8, 9936.)等。以第一作者身份在Sci. Adv.,Adv. Funct. Mater.,Adv. Electron. Mater.,JMCA(2篇),ACS AMI(4篇)等知名学术期刊发表研究论文15篇,其中高被引SCI论文3篇。
通讯作者之一卢灿辉教授简介
卢灿辉,高分子材料工程国家重点实验室(四川大学)、四川大学高分子研究所教授、博士生导师,四川省学术与技术带头人,四川省有突出贡献优秀专家,兼任中国塑料加工工业协会专家委员会副秘书长、四川省轮胎翻新与利用协会副会长。围绕 “新材料”和“难再生废弃高分子材料高效、高质、高值回收与再制造”等国家重大需求开展研究,主要开展废弃橡胶(包括特种橡胶)及交联型废弃高分子材料的解交联再生利用及再制造技术与装备开发,围绕可再生资源开展纤维素/甲壳素的微纳米加工及其与二维材料的宏观组装,重点研究其在柔性传感、纳米发电、电化学储能器件的设计、构建及其在可穿戴设备中的应用,相关成果发表在ACS Nano, Science Advances,Advanced Materials, Energy Storage Materials, Angew Chem Int Ed, Advanced Functional Materials等期刊,论文得到广泛引用和正面评价。近年来在聚烯烃高填充无机粉体复合材料、废旧轮胎橡胶和特种橡胶高值化利用新技术和新装备、纳米纤维素制备和功能材料等技术开发和产业化应用取得突出成绩,其中15项研究成果实现产业化应用,取得重大的经济效益和社会效益。研究成果曾荣获“国家技术发明奖”二等奖、“教育部科学技术奖”一等奖及中国轻工业联合会科技进步一等奖、中国专利金奖和其他省部级科技进步二等奖5项。
- 江南大学刘天西、董建成/韩国科学技术院Steve Park连发两篇 Adv. Mater.:在电子皮肤领域取得系列研究成果 2026-06-26
- 苏大张晓宏教授团队招聘博士后 - 人形机器人电子皮肤与多模态触觉感知方向 2026-06-17
- 浙江大学IBE团队蓝玲怡研究员 Nat. Commun.:仿生凝胶基电子皮肤压力传感器实现抓取过程中水果硬度的精准感知 2026-05-31
- 中国科大人形机器人研究院 AM:挤-拉打印实现高界面韧性柔性传感器的一体化集成制造 2026-07-12
- 郑州大学申长雨、刘春太团队 AFM:多模态柔性传感器实现触觉与生物电感知集成 - 推动人机交互新发展 2026-04-24
- 橡胶老树发新芽 - 橡胶“3D超界面” - 华南理工大学陈玉坤等团队 Nat. Commun. 2026-03-30
