自然环境的复杂性和可变性往往需要生物有机体能够随时改变自身的力学性能以适应不同的生活环境。例如,海参可以可逆地调整它们的肌肉结构,显著改变自身的硬度,从而对抗水下不同的洋流条件以及掠食者。受到这种能力的启发,仿生学家们试图将这种智能特性融入人工材料及软体机器人中。
可变刚度的软材料机器人是研究热点,传统变刚度软材料通常只能实现刚度0?1的两相变化,而无法实现多级、连续地调控。机械性能连续可控的软材料将赋予非结构环境下(如极端环境,人体内)的机器人新能力。

北航在智能凝胶软体机器人研究取得新进展
1月31日,北京航空航天大学刘明杰教授与文力教授合作团队在国际著名期刊《Science Advances》以Research Article形式发表了最新的研究成果“Complexmulti-phase organohydrogels with programmable mechanics towards soft-mattermachines”。该研究提出刚度连续可调油水凝胶材料,并利用“气-电”混合驱动制作软体机器人样机,实现了对不同表面刚度、粗糙度物体的连续可调控、自适应安全抓持。北京航空航天大学为该研究的第一单位。该研究涉及到包括化学、机器人、材料等多个研究领域交叉。北京航空航天大学化学学院的博士生禚淑云、博士后赵紫光、机械学院的博士生谢哲新、郝雨飞为该文的共同第一作者。化学学院许一超博士后和赵天艺副教授参与文章撰写,北京理工大学李欢军副教授参与了油水凝胶的制备,Festo公司 Elias Knubben参与软体机器人的设计。江雷院士参与项目论证与讨论。刘明杰教授与文力教授为该项目共同通讯作者。
软体机器人的“气-电”混合驱动控制方式
课题组通过水凝胶与模块化组装的油凝胶的复合,制备了一种具有力学多稳态的多相凝胶材料。由于内部的油凝胶微球具有多级的独立固液相变特性,该材料表现出温度响应的多重力学转换性质,通过调控温度,该材料可以实现三级、四级、五级乃至连续的模量调控功能,材料自身模量能够实现近20倍的改变。另外,通过将导电组分加入到油水凝胶材料中,课题组实现了电压调控材料刚度的功能。

图2:可控刚度油水凝胶在不同温度下结构变化
研究团队将油水凝胶应用于软体机器人的制造。提出了软体机器人的“气-电”混合驱动控制方式。不同于传统软体机器人通过改变内部气压大小来调控机器人的运动,在“气-电”混合驱动下,软体机器人能够在较低的驱动气压作用下,通过调控电压来控制机器人温度,进而改变机器人刚度来实现机器人运动的调控。
如同人坐在沙发上比坐在板凳上更为舒适,两个接触物体间的相近的刚度匹配能够将对物体的损伤降到最小。在“气-电”混合驱动下,利用油水凝胶制造的软体手能够通过调控自身的刚度来适应被抓物体的软硬程度,通过刚度匹配来保证物体在被稳定抓取的同时不被软体手破坏。例如,软体手可以抓持脆弱的熟蛋黄而不在其表面留下丝毫痕迹。同时,油水凝胶材料的自修复性能够使得断为两截的软体手重新愈合。
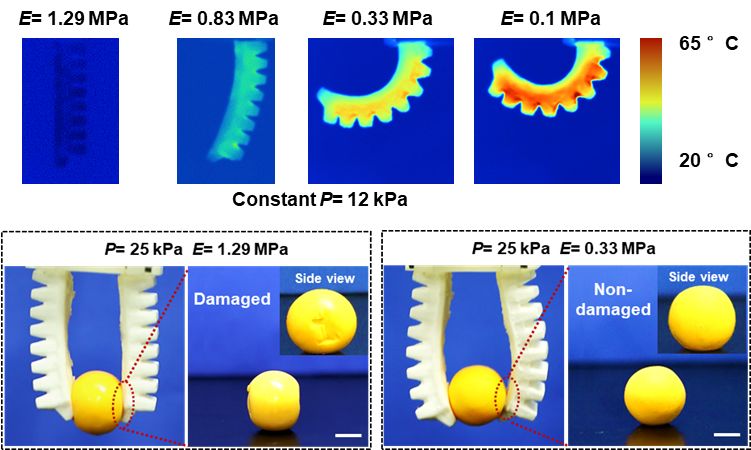
图3:可控刚度油水凝胶软体手匹配被抓物体刚度以防止破坏,软体手可抓持脆弱的蛋黄且不在其表面留痕迹。
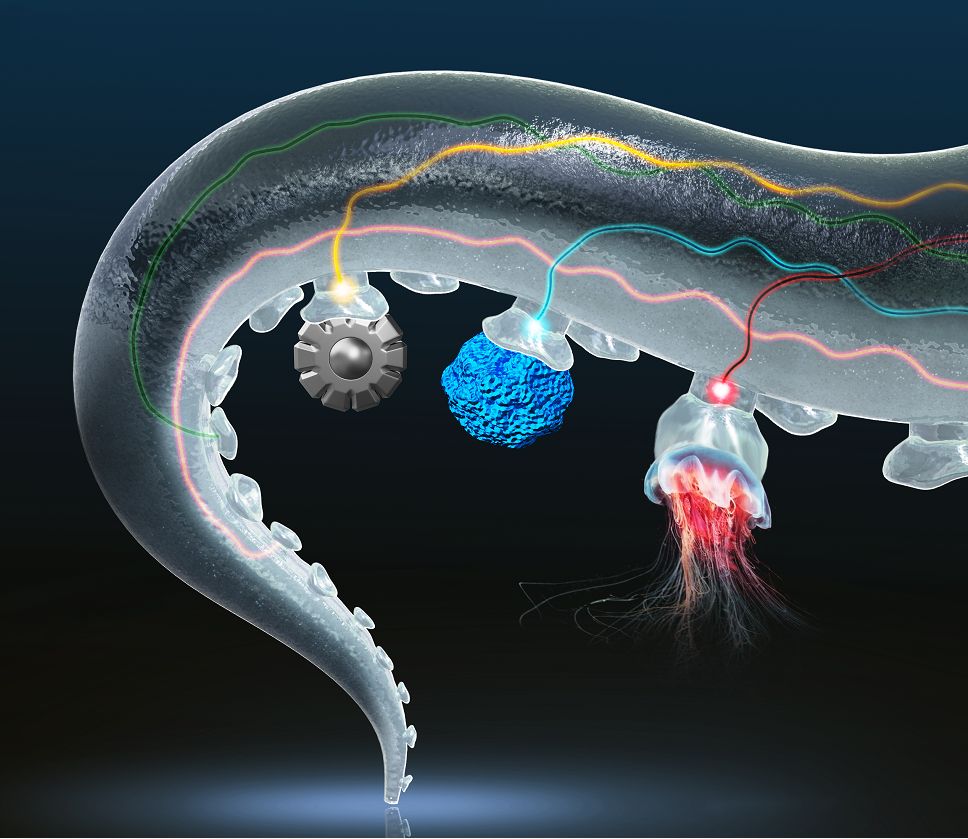
章鱼,同样是一种能够改变自身肌肉刚度的软体生物,为模拟章鱼的吸附能力,研究团队进一步将油水凝胶应用于仿生章鱼触手机器人吸盘。较硬的吸盘能够在较为光滑的表面上提供更大的吸附力,但在粗糙表面上,常因为自身的变形不足无法实现良好的密封,难以达到对粗糙表面的吸附;而较软的吸盘能够轻松实现在粗糙表面上的密封,但因为自身较易发生变形,通常难以提供大的吸附力。
为解决这个问题,在“气-电”驱动模式下工作的油水凝胶吸盘通过施加电压降低刚度,能够更好地产生变形以贴合粗糙物体表面;施加负压实现贴附过程完成后,停止供电,吸盘刚度回复,从而获得更大的吸附力。通过变刚度,研究团队发现吸盘能对200 μm粗糙表面提供约8倍于非变刚度情况下的吸附力。分布智能凝胶吸盘的章鱼触手可以对最大粗糙度超过2mm的球形物体进行有效吸附,缠绕并抓持。进一步地,结合仿生章鱼触手的缠绕作用,课题组实现了对不同尺寸、表面粗糙度的物体的缠绕-吸附抓持。

图4:集成模拟电压可控刚度油水凝胶吸盘的?鱼仿生章鱼触手机器人,分布智能凝胶吸盘的章鱼触手可以对最大粗糙度2mm的球形物体进行有效吸附抓持。
这项工作为未来材料结构性能“数字可控”的智能软材料机器人(intelligentsoft material robotics with digital controlled mechanical property)奠定了研究基础,同时为包括未来医疗微创手术机器人、软体操作,水下机器人等领域提供了新的前景与思路。
该项目得到了国家自然科学基金重点项目,自然基金委共融机器人重大研发计划课题,科技部重点研发项目等的支持。
- 给水凝胶做“瑜伽”拉伸5次,透明又抗压,成果登上 Science Advances 2026-06-16
- 厦门大学林友辉/南洋理工大学吴荣辉团队 Nat. Commun.:逐层剪切致密化实现块体水凝胶多尺度层级排列 2026-06-17
- 加州理工学院高伟课题组 Nat. Mater.:分子级整合弹性体-水凝胶双相材料 - 构建兼具组织粘附与多功能集成的新型生物电子平台 2026-06-12
- UCLA贺曦敏团队 Sci. Adv. 封面:球形无系留自维持滚动机器人 2026-05-01
- 哈工大(深圳)朱时裴教授课题组诚招硕士、博士、博士后 - 材料、化学、物理、机械、生物工程 2025-09-17
- 深圳大学黄龙彪教授团队 《Adv. Sci.》综述:生物可降解材料在软体机器人与柔性电子领域的研究进展 2025-09-10
