器官芯片是近年来生物学最热门的研究方向之一,其目的在于通过在微流控芯片中进行三维细胞的培养来重现特定器官的结构和功能特征,进行新药研发、疾病建模和生物机制的探索等。其中,心脏芯片的构建对心脏疾病机理的研究和治疗都有着重要的战略意义,是器官芯片的重要组成部分。目前的心脏芯片已经取得较大的进展,但是对于细胞微生理的传感仍然依赖于精密仪器的分析,操作复杂且成本昂贵,限制了其潜在的临床医学应用。
日前,东南大学生物科学与医学工程学院的赵远锦教授课题组受自然界蛇和毛毛虫爬行机制的启发,将生物软体机器人集成到微流控平台上构建了一种可视化的“心脏芯片”系统,为药物筛选测试提供了新型的平台。该软体机器人以心肌细胞为生物驱动器,在粗糙基底和各向异性爪子的协助下能够很好地模拟毛毛虫的爬行。将所述软体机器人集成到多轨道的微流控芯片中,它们可以对不同的刺激反映出不同的运行速度,这一特性可用来进行新药研发甚至为相关疾病提供潜在的治疗策略。
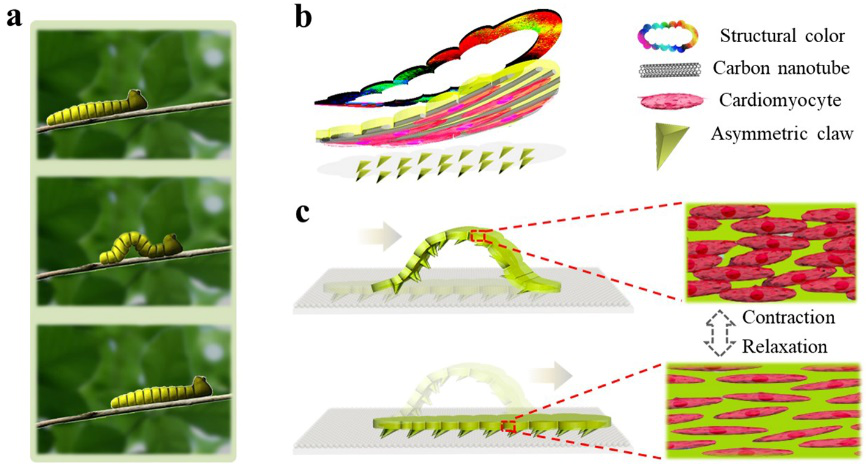
图1
在自然界中,蛇依靠其腹部的鳞片来提供直线爬行所需的各向异性摩擦力。受此现象启发,课题组成员采用模板法构建了与蛇皮结构类似的爪子,同时引入平行碳管层和结构色功能层构建软体机器人基底。利用掩模板对光的图案化隔断,还可以赋予该基底毛毛虫的外形。提取小鼠心肌细胞,在碳管覆盖的水凝胶侧进行培养。研究表明,平行的碳管层不仅对心肌细胞具有良好的取向诱导作用,并且其良好的导电性为心肌细胞提供了信号传导的平台,增强了细胞的协同收缩作用。
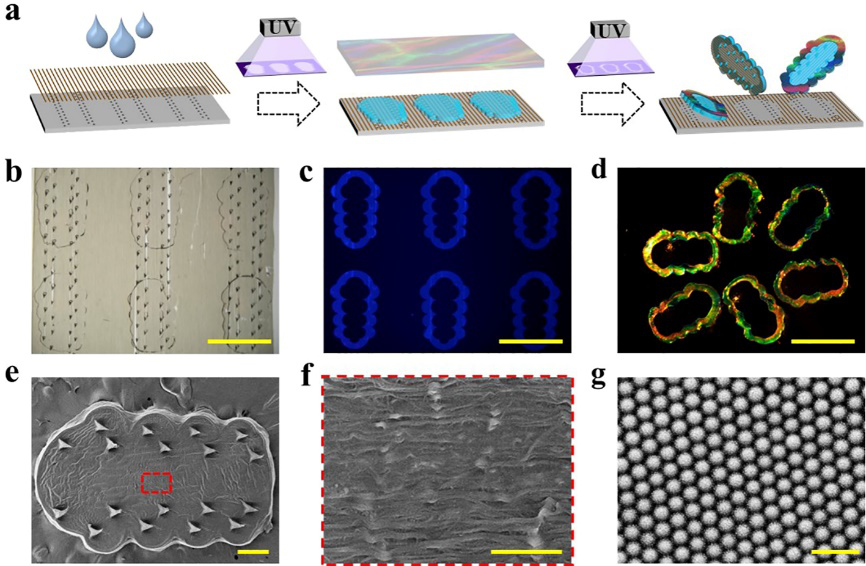
图2
在心肌细胞的驱动下,同时借助各向异性爪子和粗糙基底提供的摩擦力,软体机器人可以在平面或者小角度的斜面上实现较好的爬行。在爬行过程中,由于软体机器人角度的变化,结构色也会随之发生颜色变化,且颜色变化的程度可以直观地反映心肌细胞的活力。将所述的软体机器人集成到微流控通道中,它们可以根据不同的药物刺激进行“赛跑”。当通入高浓度的钾离子溶液模拟高钾血症模型时,软体机器人的运动速度会在短时间内加快,然后丧失运动能力。而同时注入钾离子溶液和异丙肾上腺素溶液时,软体机器人的运动性能则可以在异丙肾上腺素的刺激下得到维持。也就是说,药物对于细胞的影响可以通过软体机器人的爬行速度进行评估,从而为药物测试和疾病研究提供了直观的平台。
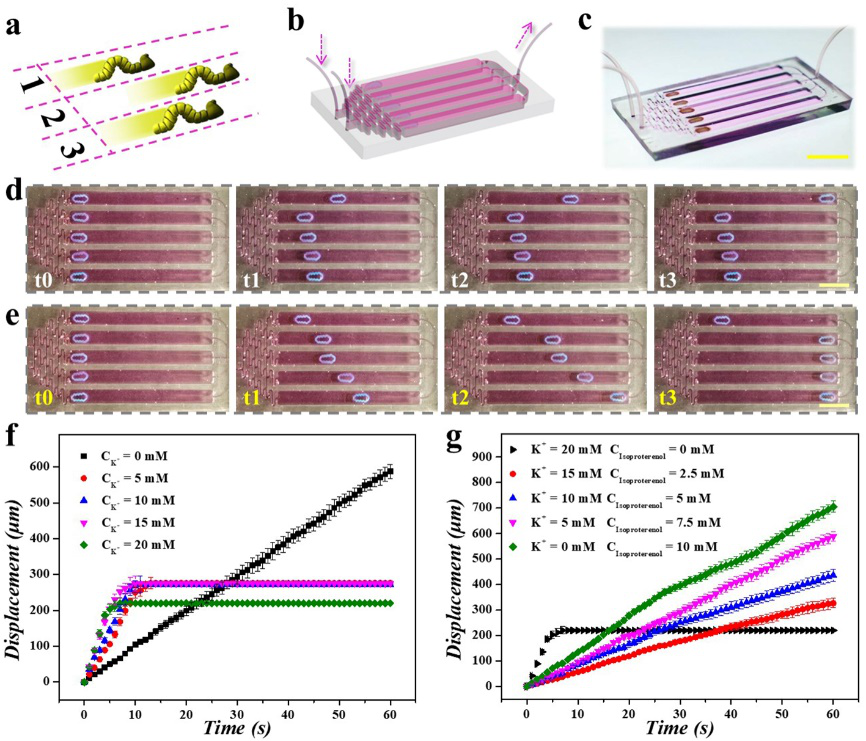
图3
赵远锦教授为该论文的唯一通讯作者,东南大学2019级博士生孙灵钰是该论文的第一作者,东南大学为该成果的第一完成单位。相关工作得到了国家重点研发计划、国家自然科学基金NSAF联合基金等项目的资助。
论文链接:https://onlinelibrary.wiley.com/doi/10.1002/adfm.201907820
- 中国科大龚兴龙教授课题组《Sci. Adv.》:仿生石蚕蛾幼虫巢穴 - 打造高安全高性能锂金属电池的“刚柔并济”电解质 2026-07-10
- 北航罗斯达教授 Sci. Adv.:激光编程软执行器-解锁仿生软体机器人变形定制新方法 2026-07-04
- 陕科大强涛涛、任龙芳教授团队 AFM:具有应变传感和溶剂触发报警的双模态仿生自修复聚氨酯基离子凝胶传感器 2026-06-22
- 东南大学赵远锦教授课题组在心脏芯片研究方面取得新进展 2019-10-29
- 东南大学赵远锦教授课题组在心脏芯片研究方面取得重要进展 2017-03-28
- 用六种“油墨”3D打印出心脏芯片 2016-10-26
- 川大微粘控团队 AFM:次序交互式纤维微流控相分离技术制备纳米皮肤纤维 2025-09-15
