作为新型能源收集装置,摩擦纳米发电机凭借着质量轻、成本低、选材方便等诸多优点,在柔性可穿戴领域成为了科研人员的研究热点。近来,关于柔性摩擦纳米发电机的报道层出不穷,但在适应人体穿戴方面,除了简单柔性的要求,拉伸性和美观度也相当重要。此外,将摩擦纳米发电机的摩擦起电机制用于可穿戴自驱动传感的研究也同样受到科研人员的关注。因此,将摩擦纳米发电机的能量收集功能与传感器的传感监测功能集合到同一器件上,制备多功能可穿戴设备,更值得科研人员的深入研究。
近日,苏州大学功能纳米与软物质研究院(FUNSOM)孙旭辉教授课题组提出了一种基于褶皱结构PEDOT:PSS薄膜电极的可拉伸摩擦纳米发电机(WP-TENG)及自驱动触觉传感监测系统。该WP-TENG利用弹性PDMS作为器件的摩擦材料,用褶皱状的PEDOT:PSS薄膜作为器件的电极材料,由此制得的透明可拉伸器件同时具备收集生物机械能,触觉传感器和人体运动监测的功能。

图1. (a)器件的制备过程图,(b)褶皱状PEDOT:PSS导电膜,(c)不同厚度导电膜光透过率,(d)该导电膜在不同拉伸条件下方阻
该WP-TENG通过预拉伸弹性PDMS膜作为摩擦层,再旋涂导电高分子PEDOT:PSS薄膜作为电极层,释放拉伸后形成褶皱状可拉伸器件。该褶皱状电极的透明度可根据刮涂的层数不同而发生改变,最佳透光率可达到90%。经测试,拉伸应变从0变化到100%的过程中,褶皱状电极的方阻可从1.40增大到4.63 kΩ/□,而同等拉伸情况下无褶皱的薄膜会增大到22.9 kΩ/□,因此,该褶皱设计增强了薄膜在拉伸过程中的稳定性。
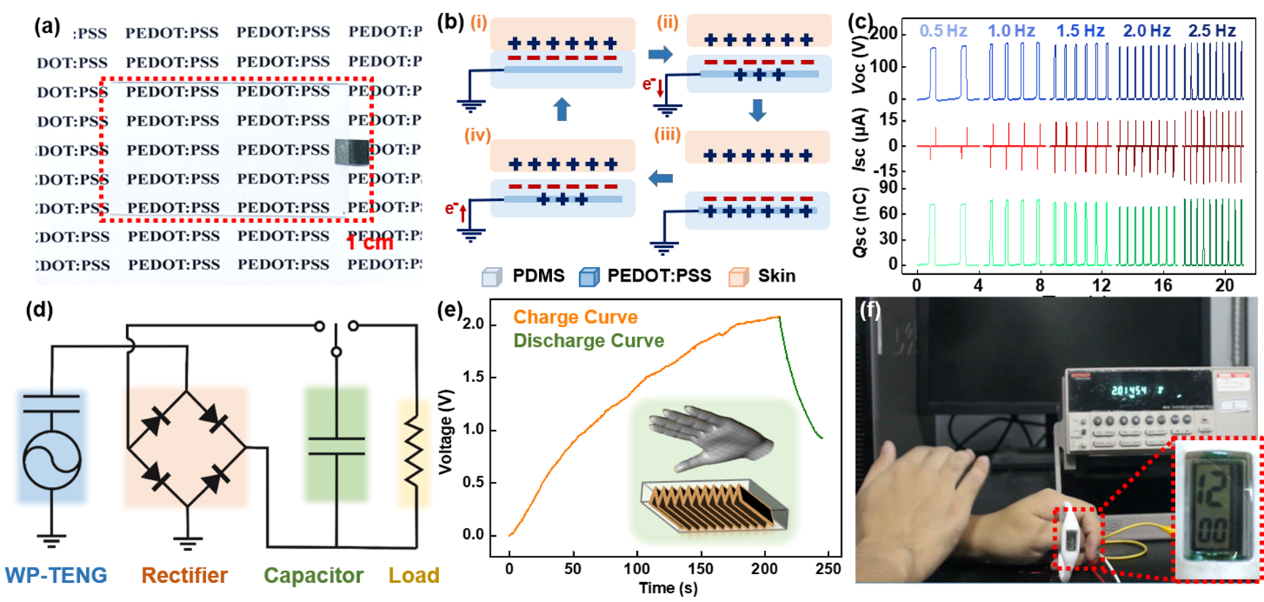
图2.(a)WP-TENG的器件实物图,(b)WP-TENG的发电机理图,(c)WP-TENG的电输出图,(d)WP-TENG使用时的电路示意图,(e)WP-TENG在手拍的运动条件下的充放电曲线图,(f)WP-TENG将电能存储于电容器后驱动电子手表的照片。
作为生物机械能收集装置,WP-TENG可以将机械能转化为电能。在单电极的工作模式下,该透明可拉伸WP-TENG可以输出180.1 V的开路电压,75.3 nC的转移电荷量,22.6 μA的最大短路电流。因此,基于其优异的电输出,研究者们将此器件用于收集人体运动(如手的拍击)所产生的机械能。通过一定的电路设计,WP-TENG产生的交流电可以在整流之后存储于电容器中,实现直流电流驱动可穿戴电子设备(便携式电子表)。

图3.(a)输出电压峰值和接触压强之间的关系,(b)一个手指尖不断增大压强来按压1像素的传感阵列输出电压,(c)3×3像素的触觉传感器实物图,(d)安装在手臂肌肉上的自驱动运动传感器用于检测肌肉运动状态及电输出,(e)固定在肘部的自驱动运动传感器用于监测肘关节的弯曲振幅及电输出,(f)固定在肘部的自驱动传感器用于检测肘关节的弯曲频率及电输出。
研究者们还将该WP-TENG放置于人体皮肤表面作为曲面电子器件,用于触觉及人体运动监测的自驱动传感器。摩擦起电机制使得该WP-TENG在没有外部电源的情况下可实现自驱动的触觉传感。在压强范围从2到60kPa内,传感器具有高灵敏度,并且本工作中组装的3像素×3像素的触觉传感器阵列可用于映射记录对象的触摸位置或与传感器接触的物体的形状。此外,它不仅可以记录简单的运动(如肌肉的起伏),也可以通过输出电压的峰值大小和峰的个数来判断关节弯曲的频率和角度。
这三个应用使得本工作提出的可拉伸透明WP-TENG在人机界面、柔性机器人、功能显示、可穿戴电子、智能衣等领域均表现出良好的发展前景。
以上相关成果发表在Advanced Functional Materials(Adv. Funct. Mater. 2018, 1803684)上。论文的第一作者为助理研究员文震博士, 共同第一作者为硕士生杨艳琴,通讯作者为孙旭辉教授和文震博士。
论文链接:https://onlinelibrary.wiley.com/doi/abs/10.1002/adfm.201803684
- 西安交大蒋庄德院士、赵立波教授团队 CEJ: 基于超声空化负载效应的静电纺丝聚合物微纳纤维功能化制造 2022-11-02
- 南开大学梁嘉杰教授 ACS Nano:提出粘弹性“水包金属”乳液胶体并应用于可拉伸印刷电子 2022-08-08
- 天津科技大学刘阳和南开大学梁嘉杰、纪欣宜《Nano Lett.》:基于界面修饰的策略提高透明可拉伸电极的拉伸性、耐久性和稳定性 2022-05-05
- 中科院理化所刘静/北林王磊团队 AM:液态金属“激活”铝电池新未来!Al-LM-Ti复合负极实现39000次超长循环 - 打造高安全柔性固态铝电池 2026-07-15
- 中国科大人形机器人研究院 AM:挤-拉打印实现高界面韧性柔性传感器的一体化集成制造 2026-07-12
- 北化王瑞雪、赵潞翔/北医三院司文喆《Adv. Sci.》:用于体内递送活性物质的全柔性等离子体贴片 2026-06-29
- 济大王鹏/浙理工孟垂舟/河北工大刘腾 Nano Energy:墨水直写机制备的具有表面螺旋结构多层电荷动态平衡非接触摩擦纳米发电机用于人机交互 2026-04-09
