基于柔性复合材料的压力传感器在医疗健康监测,软体机器人和可穿戴设备中具有广泛的用途。然而目前报道的柔性压力传感器往往具有较低的压力灵敏度或较窄的压力感应范围。近年来一些柔性压力传感器通过设计特殊的表面宏观结构,例如微球状突起,来提高灵敏度。然而,这些传感器的压力灵敏度在高压下急剧下降。这也是大多数借助表面结构提高灵敏度的压力传感器的主要缺陷。
澳大利亚伍伦贡大学李卫华教授课题组,英国伯明翰大学唐诗杨博士课题组,美国北卡罗莱纳州立大学Michael D. Dickey教授以及中国科学技术大学张世武教授课题组创新性地将复合材料的微观填料网络与宏观几何结构设计相结合,通过较为简单的加工程序成功开发出一种基于Ecoflex的液态金属磁流变弹性体(E-LMMRE)高灵敏度压力传感材料。基于这种复合材料的压力传感器在低压力(~2 Pa,4.31 kPa-1)和高压力(>3 kPa,2.28 kPa-1)下都具有极高的灵敏度,传感性能显著超越主流柔性传感器。本工作以“Liquid Metal Hybrid Composites with High-Sensitivity and Large Dynamic Range Enabled by Micro- and Macrostructure Engineering”为标题,发表在ACS Applied Polymer Materials(DOI:10.1021/acsapm.1c01111)。
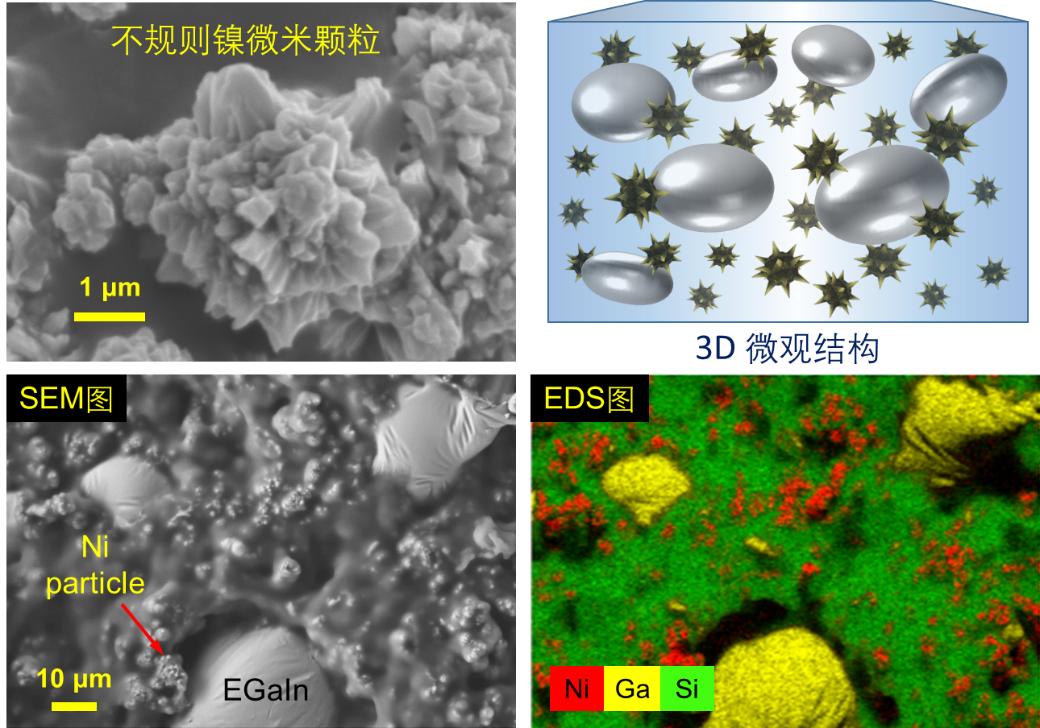
图一 E-LMMRE的空间结构及电镜和元素分布图
E-LMMRE是一种以Ecoflex硅橡胶为基质,填充尖刺形镍微米颗粒和液态金属微液滴混合填料的导电弹性体。此处使用的液态金属为镓铟合金(EGaIn,75% Ga, 25% In)。相比于球形颗粒,不规则镍颗粒表面的尖刺突起使其更容易在复合材料变形时与周围的导电填料相接触。镍颗粒-液态金属液滴形成的固-液混合填料网络使材料的电导率具有极高的应变灵敏度。Ecoflex基质的低弹性模量进一步增强了E-LMMRE的压力灵敏度。

图二 分别以Ecoflex和PDMS为基质的LMMRE的电导率-应力曲线对比
图二显示了E-LMMRE的高压力灵敏度。为进行比较,我们制备了基于PDMS基质的LMMRE(P-LMMRE)。当应力从0增加到120 kPa时,E-LMMRE的电导率急剧增加了超过一亿倍,显示出超过几乎所有已报道导电复合材料的高灵敏度。相比之下,P-LMMRE的电导率仅增加了20倍。这主要是由于二者显著的弹性模量差异。在相同配比下,E-LMMRE的弹性模量仅为P-LMMRE的六分之一。此外图二还显示LMMRE即使在拉伸时电导率依然急剧增加。这种反常的应力应变响应解决了先前的绝大多数复合材料在拉伸应变下电导率显著下降的问题,拓展了LMMRE的应用范围。
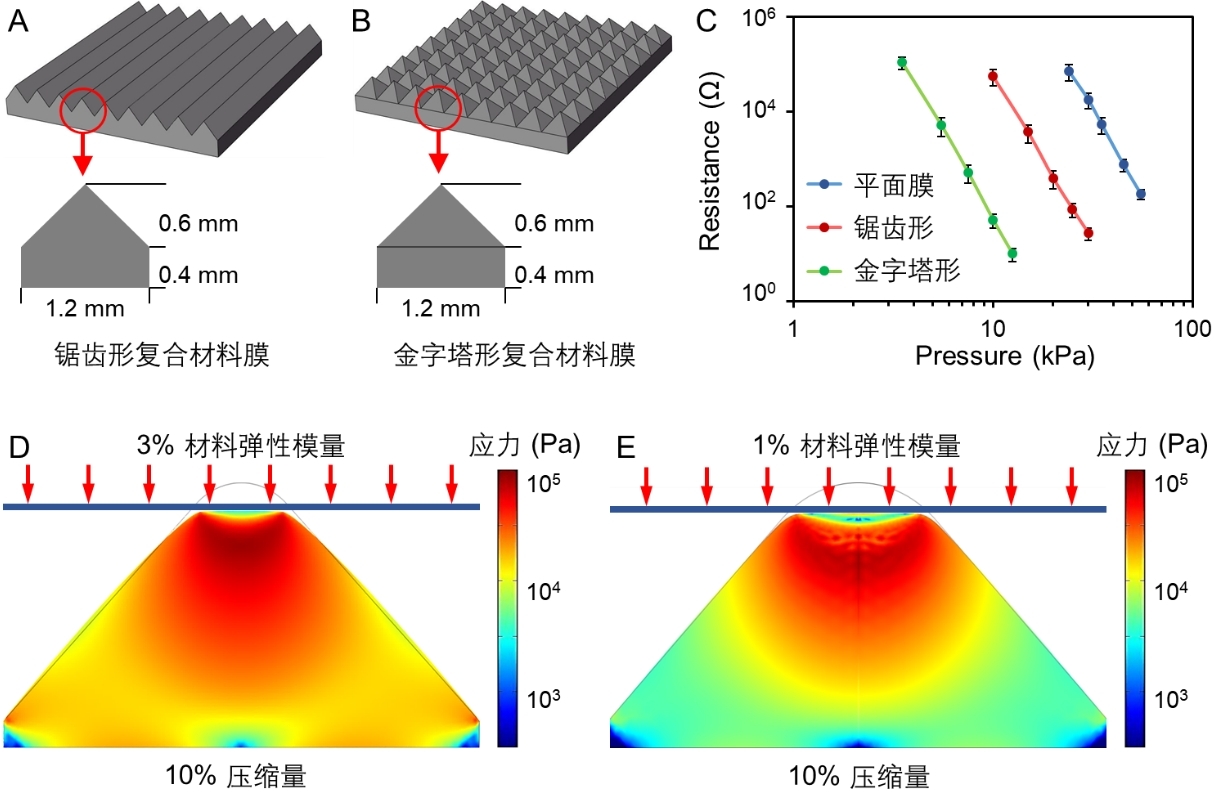
图三 具有不同表面结构的E-LMMRE膜的电阻和应力应变分布对比
在E-LMMRE的基础上,我们通过表面宏观结构设计开发了具有更高压力灵敏度的E-LMMRE膜,并应用在智能压感加热装置和柔性压力传感器中。我们在此尝试了两种表面结构:锯齿形结构和金字塔形凸起结构。图三C对比了平面/锯齿/金字塔形膜的电阻-压力曲线,可以看出金字塔形膜具有最高的电导率与压力灵敏度。我们通过模拟单个锯齿形或金字塔形突触在压力下的应力应变分布解释了这一现象。为使复合材料膜产生10%的压缩应变,对于平面膜自然需要10%的LMMRE弹性模量。而对于锯齿形或金字塔形LMMRE膜,所需压强分别仅为3%或1%弹性模量。我们的研究表明LMMRE的电导率仅与其应变有关。因此,金字塔膜只需平面膜1/10的压强即可产生相同的电阻变化,换言之金字塔膜的压力灵敏度为平面膜的10倍。
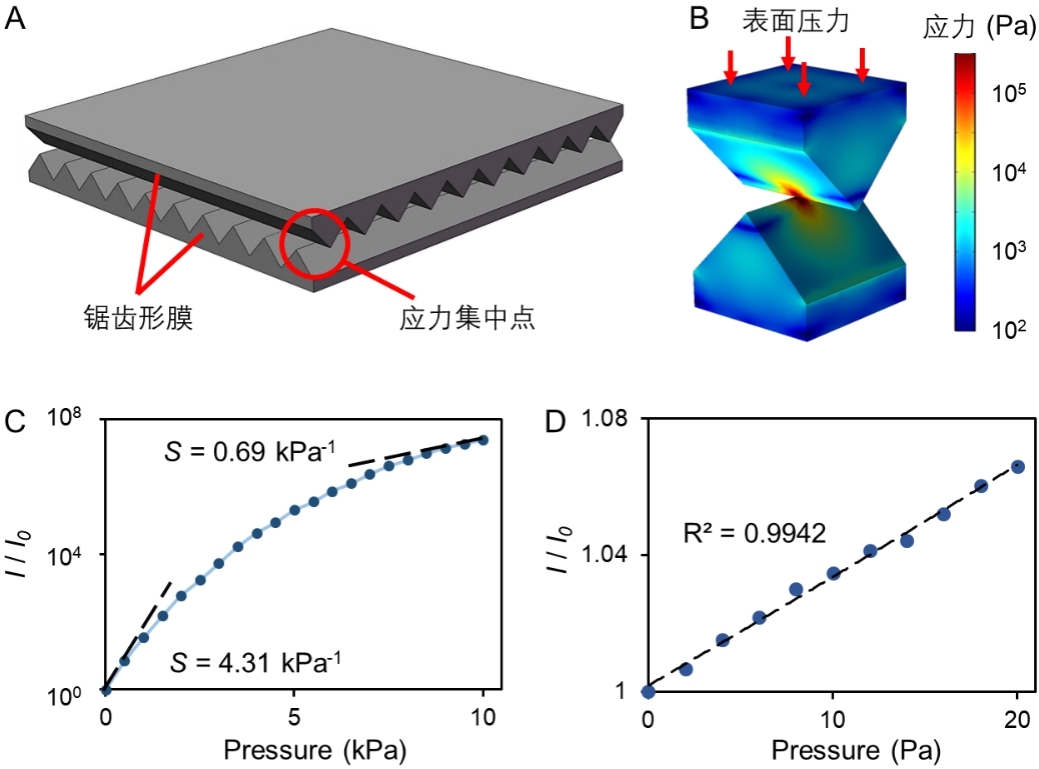
图四 基于双层E-LMMRE锯齿膜的高灵敏度宽检测范围压力传感器
基于具有特殊表面结构的E-LMMRE膜,我们开发了具有高压力灵敏度和分辨率的柔性压力传感器。传感器的结构如图四所示。我们将两个E-LMMRE锯齿形薄膜面对面放置,锯齿结构彼此垂直。在压缩过程中,应力集中在锯齿结构尖端的接触点上以放大传感器的表面压力,导致更显著的变形和更高的灵敏度。根据图四C的传感器在0-10 kPa的压强下的相对电流-压强曲线。压力传感器在低压下具有高达4.31 kPa-1的灵敏度。一些先前报道的压力传感器也具有类似的高灵敏度,然而它们的灵敏度往往在高压强(>3 kPa)下迅速下降至不足0.1 kPa-1。与它们相比,E-LMMRE传感器在3 kPa时的灵敏度仍然高达2.28 kPa-1。此外E-LMMRE传感器还具有极高的压强分辨率(2 Pa)和低检测限(2 Pa)。该传感器不仅可在较宽的压力检测范围内维持极高的压力灵敏度,而且制造成本低加工程序简单,可以由在3D打印模具中固化的E-LMMRE薄膜轻松组装而成。因而具有大规模制造的可行性和更广阔的的应用前景。
中国科学技术大学博士后贠国霖为论文第一作者,英国伯明翰大学唐诗杨博士,澳大利亚伍伦贡大学李卫华教授,美国北卡罗莱纳州立大学Michael D. Dickey教授为共同通讯作者。
作者简介

本文第一作者贠国霖于2017年毕业于中国科学技术大学(USTC),获理学学士学位。于2021年在李卫华教授指导下毕业于澳大利亚伍伦贡大学(UOW),获博士学位。目前在中国科学技术大学工程科学学院的仿生机器人实验室任博士后研究员,导师为张世武教授。其研究方向主要包括液态金属,可拉伸导电复合材料及其在柔性传感器和可拉伸电子产品中的应用。
相关链接
https://doi.org/10.1021/acsapm.1c01111