液态金属(LM)液滴的受控驱动在开发机器人智能驱动系统方面显示出巨大的潜力。然而,如何在二维平面上实现对多个LM液滴的精确操作,使其精准受控实现并发驱动、分裂和合并,是制约当前液态金属机器人操控关键性技术发展的难点。 中国科学技术大学张世武教授课题组, 英国伯明翰大学唐诗杨博士课题组,苏州大学李相鹏教授课题组以及澳大利亚伍伦贡大学李卫华教授课题组提出了一种多功能且通用的光诱导操纵LM液滴的方案。其关键原理是使用激光束选择性地激活电解液中的光电晶体管,从而利用马拉高尼力(Marangoni force)实现对LM液滴的电气控制。无需复杂和庞大的系统,简单使用光就可诱导多个LM液滴的并发运动、分裂和合并。该项工作有望为协作式现场可编程智能材料的开发提供新的方向和实用的技术方案。相关成果以标题 “Light-controlled versatile manipulation of liquid metal droplets: a gateway to future liquid robots” 发表在 Materials Horizons 上(该文章开源获取)。

图1 实验装置和工作机理
液滴控制系统由实验平台和控制电路组成,如图1a和b所示。在该工作所述的系统中,铜电极连接到阳极,石墨电极连接到阴极。激光激活控制电路后,将在LM 液滴的表面产生界面张力梯度,从而产生马拉高尼力将液滴驱动至被激活的电极。图1c展示了LM液滴在激光的指引下以3cm/s的速度沿直线运动。图1d则显示出光诱导LM液滴运动的过程中具有良好的跟踪精度。
该工作还研究了不同操作参数对驱动性能的影响,包括光斑的大小、电解质浓度、电压和LM液滴的大小。此外,该工作还测试了不同情况下液滴的跟踪精度。
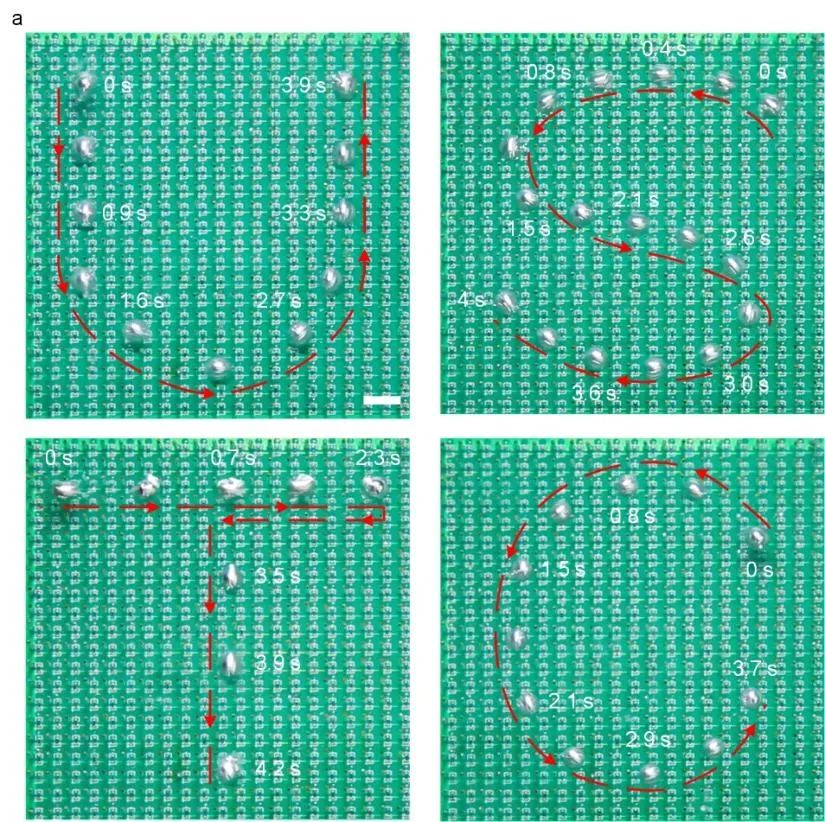
图2 LM液滴沿不同轨迹运动的快照
该工作进一步通过LM液滴在二维平面跟踪激光光斑沿“U”、“S”、“T”和“C”的轨迹移动展现了其强大的液滴操纵性能,如图2所示。在此过程中,LM液滴以较小跟踪误差平滑地跟踪光斑路径,表明该方案能够实现控制LM液滴在二维平面中沿任意复杂轨迹精确运动。
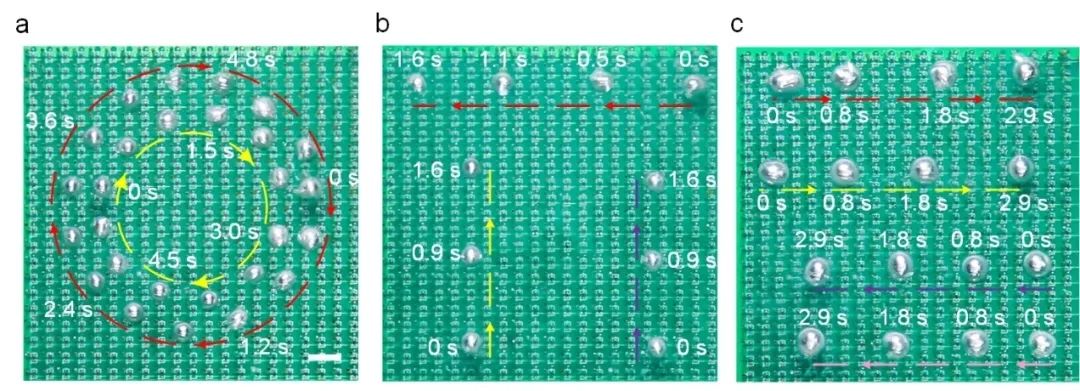
图3 多LM液滴的并行驱动
光诱导驱动能轻易实现对多个LM液滴的并发控制。多束激光同时照射时能够激活处于不同位置的电极,进而产生多个局部电势梯度并捕获附近的LM液滴。多液滴沿不同轨迹运动的过程,如图3 a-c所示。
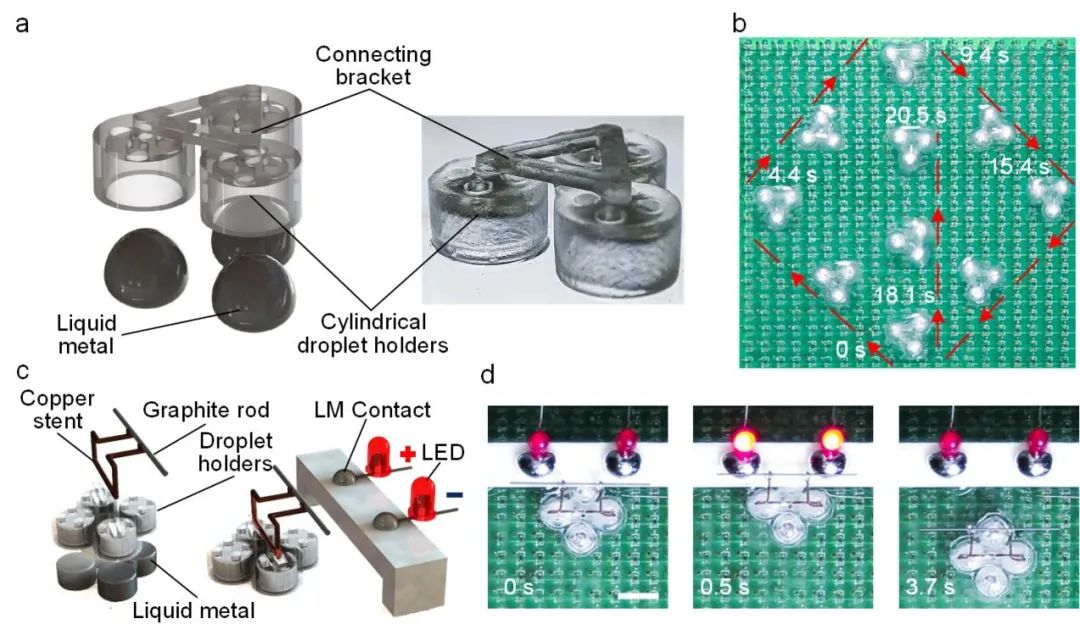
图4 LM液滴车辆与光控继电器
该工作还展示了由多个LM液滴组成的车轮驱动的车辆,如图4a-b所示。这表明一个激光光斑也可以引导多个液滴且具有一定的负载能力。为了更好地开发光控LM液滴的应用,该工作还设计了一个光控继电器来演示对电路的远程控制,如图4c-d所示。
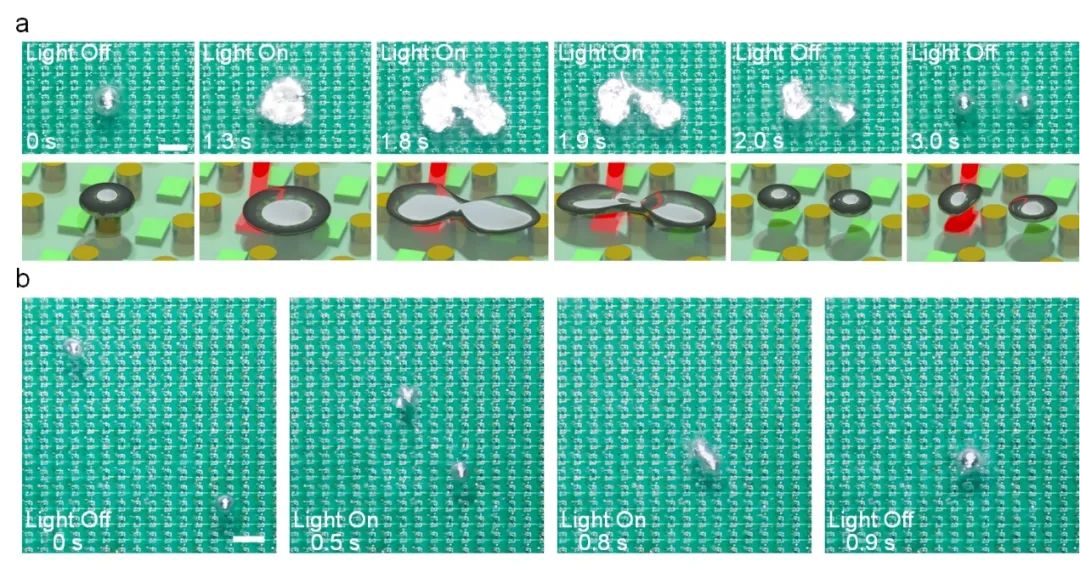
图5 LM液滴的受控分裂与合并
LM液滴的形状是表面张力和重力综合作用的结果,因此,可以通过电化学改变LM液滴的表面张力来诱导变形甚至分裂。研究者使用斜入射的激光束照射LM液滴下方的光电晶体管激活电极,之后LM液滴就会发生电化学氧化反应发生变形。有趣的是,一部分LM液滴倾向于从接触电极的位置流走,并最终分裂形成两个液滴,如图5a所示。此外,在相对较高的速度下,两个液滴在惯性的作用下克服表面张力合并成一个大的LM液滴,如图5b所示。
总之,该项工作展示了一种多功能、通用的光诱导LM液滴操纵方案。该方案可以很容易地诱导多液滴并发驱动、分裂和合并,且能够可最大限度地减少滞后并避免改变LM的内在特性。这种用于操纵LM液滴的光诱导控制方法为在MEMS、现场可编程机器人和基于液滴的液体协作机器人领域的开创性未来研究提供了新的方向和技术途径。 中国科学技术大学博士研究生任宏泰,中国科学技术大学特任副研究员金虎为论文共同第一作者,中国科学技术大学张世武教授,英国伯明翰大学唐诗杨博士,以及苏州大学李相鹏教授为共同通讯作者。
作者简介
本文共同第一作者任宏泰,于2018年毕业于合肥工业大学(HFUT),获工学学士学位。现于中国科学技术大学张世武教授指导下攻读博士学位。其研究方向包括液态金属及基于SMA柔性机器人的开发。

本文共同第一作者金虎,现任中国科学技术大学精密机械与精密仪器系特任副研究员。主要从事智能材料、仿生机器人、以及柔性机器人建模与控制方面的研究, 2016年至今在智能材料与仿生机器人领域发表SCI一作/通讯论文9篇,主持国自然青年基金1项、安徽省自然基金重点项目1项和安徽省重点研发项目1项
相关链接
https://pubs.rsc.org/en/content/articlelanding/2021/mh/d1mh00647a