自然界中,结并不只是束缚与缠绕的象征。从蠕虫团、藤蔓到蛋白质,拓扑结构都可能承担着储能、释放和引导运动的重要角色。如今,研究人员把“打结”这件看似普通的事,变成了一种全新的软体驱动器设计策略。
近日,美国宾夕法尼亚大学(University of Pennsylvania)杨澍(Shu Yang)教授团队和加州大学洛杉矶分校(UCLA)金丽华(Lihua Jin)教授团队合作提出了一类基于“绳结拓扑”编程的微型软体驱动器。
2026年4月23日,相关研究以“Programming touch-me-not knot topologies for rapid and diverse leaping and flying motions”为题发表在《Science》上。本文通讯作者为杨澍(Shu Yang)教授,第一作者为洪尧烨(Yaoye Hong)。合作者还包括加州大学洛杉矶分校(UCLA)金丽华(Lihua Jin)教授、博士生刘伟轩(Weixuan Liu),以及来自宾夕法尼亚大学的Yinding Chi、Antonio Proctor Martinez、Bingzhi He、Ziyun Zhang、Kun-Yu Wang、Alexander Y. Wang。
研究团队利用Kevlar凯芙拉增强液晶弹性体(LCE)复合纤维,制成毫米尺度的弹性绳结,在加热、轻微机械刺激亦或光热刺激下,这些小结会像“含羞草种荚”一样瞬间解开,把原本储存在结中的弹性能快速转化为动能,从而实现高跳、翻转、旋转,甚至进一步过渡到飞行。更重要的是,这种运动不是随机的。研究人员发现,只要精心设计结的拓扑结构,并结合液晶弹性体内部的分子各向异性,就能够“编程”起跳后的动作甚至飞行模式,让驱动器在腾空之后表现出不同的空中行为,例如后空翻、自旋以及分步骤的“体操式”连续动作。
一个小结,为什么能跳这么高?
传统软体跳跃机器人虽然也会利用弹跃(snapping)特性,即弹性储能和快速释放,来放大性能,但在跳跃高度、可编程性以及从跳跃向飞行的过渡能力上仍然存在明显限制。文章指出,现有许多软体跳跃系统往往只能实现单一模式的起跳,很难在起跳后继续精确控制空中动作,更难以像昆虫那样兼具爆发式起跳与灵活空中机动。反之,金属型硬体机器人虽然机动性能强,但通常需要消耗很大的功率。
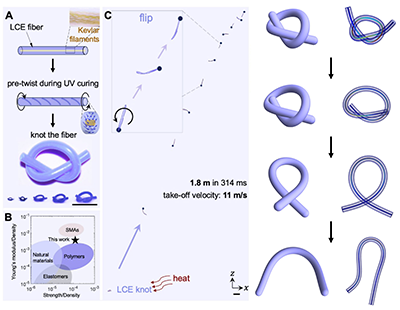
图1:LCE绳结的制作、跳跃过程以及解开的方式
这项工作的关键在于将弹性引入通常柔软的结中,把“结的解开过程”变成快速弹跃(snapping),从而实现一种高效的能量释放机制。研究团队使用的复合纤维由Kevlar凯芙拉多单丝内核与 LCE 外壳 组成:前者提供高强度、高刚度和轻量化支撑,后者则通过预扭转赋予材料可编程的热致扭转可驱动能力。加热后,LCE 外壳沿预扭螺旋方向产生收缩应力,但 Kevlar 内核抑制了显著轴向收缩,于是整个纤维转而发生自发扭转形变,进而产生足以克服摩擦的驱动力,触发结的瞬时解开和弹跳。实验中,当一个 6.5 mm身长的绳结被加热到液晶向列相到各向同性相的转变温度以上(约 90 °C)时,这种 LCE 结可在毫秒内解开,并跃升1.8 米的高度;整个过程仅约 300 毫秒。对于毫米级器件而言,这样的表现十分惊人。
不只是跳得高,还能“按剧本”翻、转、连跳
如果说高跳体现的是通过弹跃(snapping)实现的快速能量释放,那么更令人印象深刻的,是这项工作把运动模式也“拓扑编程”了。研究团队发现,结的形状和复杂程度会显著影响弹性势能中弯曲能与扭转能的分配,也会改变解结所需的“步数”。
基于这一点,他们创造性地利用曲率、扭转及Frenet标架与材料标架的关系,简洁地统一了拓扑结构与液晶取向:一方面,用弯曲能(bending)和扭转能(twisting)之比来判断动作更偏向翻转还是旋转;另一方面,用拓扑变量“解结数”来决定动作是一步完成,还是分阶段展开。
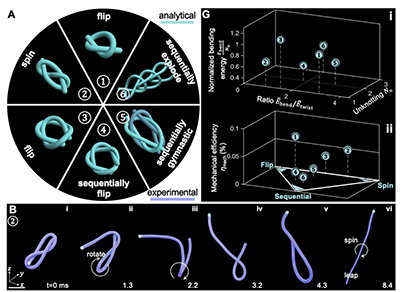
图2:拓扑编程的多种绳结运动
例如,某些结的拓扑更偏向弯曲能主导,因此在起跳后会表现为后空翻(flip);而另一些结则由扭转能主导,起跳后会出现自旋转(spin)。当结的拓扑更复杂、解结数更高时,驱动器甚至可以表现出两步或三步连续动作:先完成第一次起跳,再在落地或中途继续解结,触发第二次、第三次跃迁,呈现出类似体操连招的时序行为。换句话说,这里“结”不再只是结构形态,而变成了一种能够决定动作剧本的编码方式。
从跳跃到飞行:用翻转来控制飞行轨迹
更进一步,研究人员还尝试用不同的运动模式来编程绳结的飞行。为了增强绳结与空气的相互作用,团队在纤维上集成了不同形状的小翼结构。当翼与特定拓扑的结结合后,起跳后的翻转或旋转不再只是空中姿态,而会与空气动力学耦合,形成更复杂的飞行轨迹。
比如,研究团队把叶片状翼平行安装在纤维上。起跳后,结会在空中翻转,而这种翻转会像陀螺进动一样不断改变翼面方向,使气动力持续偏转,最终形成类似回旋镖的返回轨迹。这种“自返回”飞行来自翻转运动、翼面法向气动力和进动效应三者之间的耦合。 另一种设计则利用自旋主导的结拓扑,配合弯折的平行四边形翼,实现带有自旋的飞行。由于旋转过程中翼面持续产生法向气动力,器件不仅可以在空中维持旋转,还能实现更稳定的垂直下降与定向着陆。
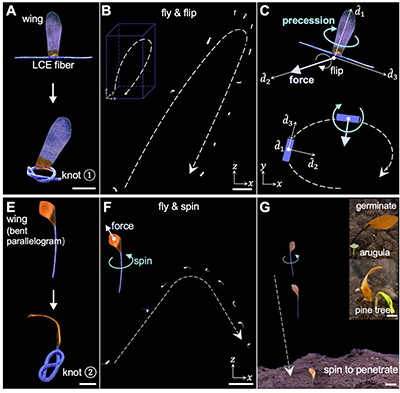
图3:自返回以及自旋飞行以及在森林再生方向的潜在应用
能落地、能钻土,甚至能播种
这类运动并非只是“好看”。研究团队展示了一个很有想象力的应用方向:自埋式空中播种。当带翼自旋结构垂直下落时,旋转与下冲过程耦合,可为器件提供强有力的推进,使其直插入土壤。通过这种热力推动的无人驾驶播种机,研究人员成功实现了松树种子和芝麻菜种子的萌发,显示出其在森林再生中的潜力。原文还指出,这类结状致动器不仅能够在从地面起跳,还可从 水、沙和雪等不同表面环境中起跳,并可由热、光热、甚至光方式触发,表现出较好的环境适应性。
总结
这项研究的意义,不仅在于做出了一个“跳得很高的小驱动器”,更在于它提出了一种新的设计范式:把拓扑结构、材料各向异性和快速能量释放统一起来,作为软体机器人运动编程的核心机制。过去,软体驱动器往往更多依赖材料本身、驱动方式或几何外形来操控动作;而这项工作表明,“结怎么打” 也可以成为预先控制运动模式的重要自由度。通过对结拓扑、弯扭耦合和解结数的系统设计,研究团队实现了从高跳、翻转、自旋,到返回飞行、垂直下降乃至自埋播种的一系列功能演化。
对于软体机器人、智能材料、微型飞行驱动器乃至环境工程应用而言,这种“拓扑编码运动”的思路,可能为未来的高机动、低驱动要求、自主式微型驱动系统打开新的方向。
原文链接:https://www.science.org/doi/10.1126/science.aed0434
- 合工大胡颖团队 AFM:植物叶片启发的可编程形变与湿致变色软体驱动器 2026-03-28
- 南邮黄维团队 ACS Nano:研制出新型 Janus 薄膜软体驱动器 - 实现多刺激响应智能驱动 2025-09-11
- 吉大宋文龙教授、中科院理化所王树涛研究员《Adv. Mater.》:受黏膜启发的电响应润滑超分子共价水凝胶 2023-10-01
- 南开大学刘遵峰合作团队 AM:破解液晶弹性体纤维力学-驱动-阻尼三元矛盾→揭示全新连续液晶相变过程 2026-07-10
- 斯坦福赵芮可教授团队 Nat. Commun.: 具有时空可编程表面褶皱的光热驱动液晶弹性体多功能平台用于信息编码与物体操控 2026-07-01
- 天津大学封伟教授团队 Angew: 胆甾液晶弹性体变色光子材料前沿进展 2026-06-22
