在自然界中,很多智能生物,如章鱼、水母和蠕虫等都兼具环境感知能力和多模态运动能力。受益于这些独特的能力,智能生物能够在感知外界环境变化的同时,适时地调整其自身形状和自身所处的空间位置,进而在复杂环境中完成各种自适应运动,对提升智能生物的容错率和应急响应性至关重要。与这些智能生物相比,现有的人造柔性致动器仍存在形变模式单一、运动过程缓慢、缺乏自我反馈能力等问题。这些缺点降低了人造柔性致动器在复杂多变环境中的灵活性和适应性,使其难以应用于实际场景中。因此,开发具有多模态运动能力和稳定自感知能力的新型柔性致动器是一个极具意义的研究课题。
近日,东北大学理学院王铁强副教授、孟凡宝教授与四川轻化工大学付昱教授合作,制备了一种兼具超快响应速度、多模态运动能力和灵敏自感知特性的海绵状水凝胶致动器。该工作以温度诱导微相分离聚合方法制备的海绵状聚N-异丙基丙烯酰胺(PNIPAM)水凝胶为基础,结合磁性Fe3O4纳米粒子的原位化学共沉淀和聚吡咯(PPy)的原位氧化聚合,构筑了具有多响应性的海绵状自感知水凝胶(S-PNIPAM/Fe3O4/PPy)。通过调整近红外光和磁场的不同组合,基于S-PNIPAM/Fe3O4/PPy的水凝胶致动器能够在三维空间内分别完成折叠,收缩,光/磁追踪,特殊弯曲等远程光/磁调控的可定制多模态形变。此外,在磁场的驱动下,水凝胶致动器还能够在密闭空间中精确导航到指定位置,并执行抓取,搬运,释放等一系列连续形变行为以完成实际的工作任务。值得注意的是,PPy的引入使水凝胶致动器在发生形变时能够产生可检测的实时电学信号,受益于这种低迟滞的自感知特性,通过将电学信号映射为图像信号,水凝胶致动器的形变过程能够得到了实时的图像反馈。借助于这种高效的电学反馈机制,水凝胶致动器能够有效模仿智能生命体在复杂环境中的自适应运动。当场景中出现干扰因素时(干扰光或干扰物),水凝胶致动器能够迅速地感知和判断环境变化情况,并根据信号强弱对其自身形变行为做出适当调节,展现出良好的自诊断和自适应能力。这种具有多模态运动能力的海绵状自感知水凝胶致动器为具有更高的自主性和复杂性的下一代柔性机器人的开发提供了新思路。

图一、多响应海绵状自感知水凝胶的制备流程以及闭环回路控制下水凝胶致动器的可视化多模态运动示意图。
亮点1:可定制的多模态运动行为
本工作中,磁性Fe3O4纳米粒子和导电聚合物PPy赋予海绵状PNIPAM水凝胶以良好的磁响应性和光热转化特性,通过调整近红外光和磁场的不同组合,水凝胶致动器能够分别完成“折叠-恢复”运动行为和“收缩-伸展”运动行为等两种不同模式的可控形变,通过改变光和磁的组合情况,水凝胶致动器的运动行为能够在两种模式间自由切换。此外,通过调整近红外光/磁场的数量,空间位置和作用方向等外界刺激参数,水凝胶致动器能够分别完成光/磁追踪、特异性弯曲等不同类型的特殊形变,展现出可定制的多模态运动能力。

图二、水凝胶致动器的“折叠-恢复”形变行为和“收缩-伸展”形变行为
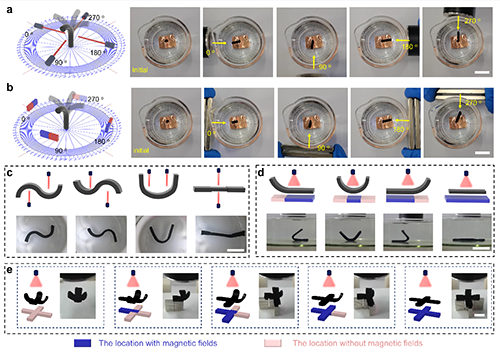
图三、水凝胶致动器的光/磁追踪形变行为和特异性弯曲形变行为
亮点2:精准的磁控导航能力
本工作中,磁性材料的引入赋予水凝胶致动器良好的磁响应性,在外部磁场的驱动下,水凝胶致动器能够自由导航到密闭空间内的任意指定位置,完成“走迷宫”等空间移动任务,在近红外光的作用下,致动器还可以自发完成收缩形变,进而顺利通过密闭空间内的特殊地段(如某些狭窄区域等)。此外,受益于水凝胶致动器良好的磁控导航能力和光致形变能力,基于水凝胶致动器制备的柔性抓手能够在密闭空间中完成抓取,移动,释放等一系列连续运动行为,顺利应对不同的实际任务。

图四、密闭空间内水凝胶致动器的磁控导航行为和连续形变行为
亮点3:低迟滞的形变自感知能力
本工作中,水凝胶内的海绵状PNIPAM网络与导电聚合物PPy形成了半互穿网络结构,两种组分能够在接近分子级别的微观尺度上有效复合。当水凝胶致动器发生形变时,PNIPAM网络的收缩会导致PPy分子链发生同步迁移,产生电学性能变化。受益于PNIPAM网络与PPy分子链之间独特的半互穿网络结构,水凝胶致动器的形变行为与其电学传感信号几乎同时产生,在不同刺激强度下的连续测试和50次循环测试中,其形变能力和电学自感知能力都表现出良好的稳定性。结合“电学信号-图像信号“的转换端口,致动器的弯曲行为能够得到实时的图像模拟。
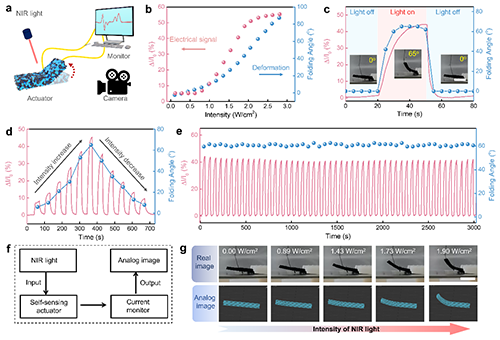
图五、水凝胶致动器的自感知性能及形变过程中的实时图像模拟。
亮点4:复杂环境中的形变自适应能力
在低迟滞自感知性能的基础上,通过连接到监测器,自动控制系统及可调谐激光器等组件构成的闭环控制回路中,水凝胶致动器展现出了复杂环境中的形变自适应能力。在该回路中,水凝胶致动器兼具感受器和效应器的双重作用,其传出的电学信号和接收的红外光信号依次模拟了传入神经和传出神经。当环境中出现干扰光或干扰物时,水凝胶致动器的行为姿态发生改变并产生实时的电学信号。根据其反馈出的电学信号,闭环系统能够在无人干预的情况下对水凝胶致动器所处的环境情况进行快速判断,并通过改变主激光器的入射光强,实现对致动器的行为和姿态的快速调节。这种自适应运动行为在一定程度上模拟了自然界中智能生物“神经-肌肉”系统控制的智能运动,为新型智能仿生材料的设计和开发提供了新的思路。
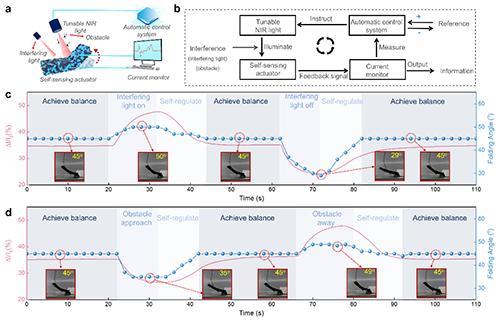
图六、水凝胶致动器在复杂多变场景中的自适应形变行为。
结论:该工作制备了一种具有多响应性的海绵状自感知水凝胶材料。以该材料构筑的水凝胶致动器,表现出可定制的多模态运动能力,精准的磁控导航能力,灵敏的电学自感知能力和复杂环境中的形变自适应能力,实现了复杂场景中的自诊断和自适应,为下一代智能软体机器人的设计和制造提供了新的思路。
该成果以“Sponge-like PNIPAM/Fe3O4/PPy composite hydrogel actuator with rapid response, self-sensing and multiple manipulating manners for complex application scenarios” 为题发表在《Chemical Engineering Journal》上。东北大学博士研究生崔兴臣为文章的第一作者,东北大学王铁强副教授、孟凡宝教授与四川轻化工大学付昱教授为文章的共同通讯作者。
原文链接:
https://authors.elsevier.com/c/1lkUO4x7R2oFT1
https://doi.org/10.1016/j.cej.2025.168066
- 南京大学徐飞教授/王漱明教授 Nat. Commun.:光纤-Meta集成 - 基于Janus超构光纤的多模态内窥 2026-06-21
- 苏大张晓宏教授团队招聘博士后 - 人形机器人电子皮肤与多模态触觉感知方向 2026-06-17
- 苏州大学张晓宏教授课题组招聘柔性电子器件方向博士后 2026-05-06
- 哈工大冷劲松院士团队 CEJ:用于智能热防护系统的具有可调隔热性能的自感知形状记忆硼酚醛气凝胶 2025-01-18
- 北理工陈煜教授团队 AFM:琼脂/两性离子水凝胶用于温度自感知和电响应驱动 2024-01-10
- 东北大学田野团队 NML:仿生多功能自感知驱动的梯度水凝胶用于软硬机器人的远程交互 2024-01-10
- 长春工大刘鑫、张钦课题组 Angew:一种兼具高机械强度与高锌离子迁移率的可回收超分子水凝胶电解质用于稳定锌负极 2026-07-13
