近日,西湖大学姜汉卿团队、复旦大学张壮研究员联合西湖大学王蕾团队以及绍兴文理学院卢军强团队,基于折纸工艺利用可降解纤维素薄膜开发了一种可持续性闭环控制机器人系统,相关研究工作以“Biodegradable Origami Enables Closed-Loop Sustainable Robotic Systems” 为题发表于《科学进展(Science Advances)》杂志。

近年来,软体机器人由于其高度柔性和顺应性的特点,可以高度适配用户友好的人机交互界面,因此获得蓬勃发展。目前,基于化学合成的橡胶态软材料由于其较好的成型性、弹性、稳定性以及多功能性,成为软体机器人构筑用材料的主要选择。然而,这些橡胶态软材料的制备过程通常涉及对环境有害的有机溶剂或者产生无法降解的产物,对于机器人领域的可持续发展产生严重的负面影响。为了解决机器人制备过程中对于环境的负面影响,研究者们开始开发可回收或可降解凝胶用于构筑软体机器人,但是所构筑的软体机器人通常只具有单一的驱动或传感功能,并且由于凝胶材料力学性能的限制,所构筑的机器人的性能通常较差。因此亟需开发一种基于力学稳定可持续性材料的新型机器人结构,实现具有全机器人功能的可靠、可持续以及可降解的软体机器人系统。
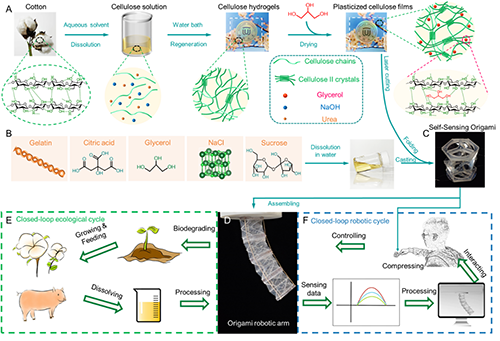
图1. 可持续性折纸机器人系统的构筑方法

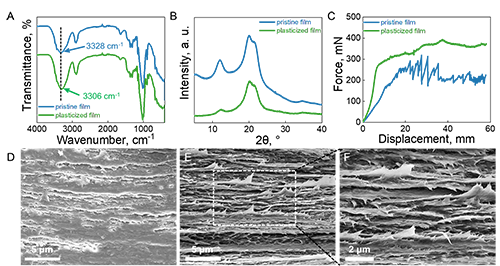
图3. 纤维素薄膜增塑效应评价
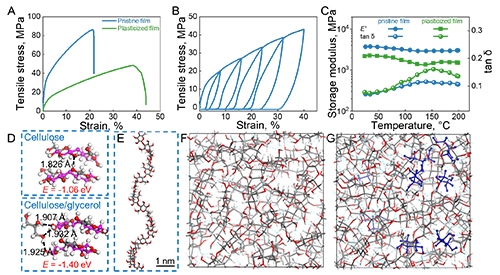
图4. 纤维素薄膜增塑前后力学性能与相互作用
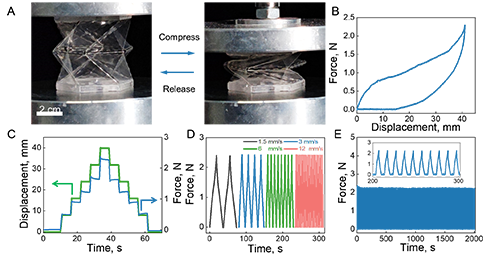
图5. 纤维素折纸单元的力学性能
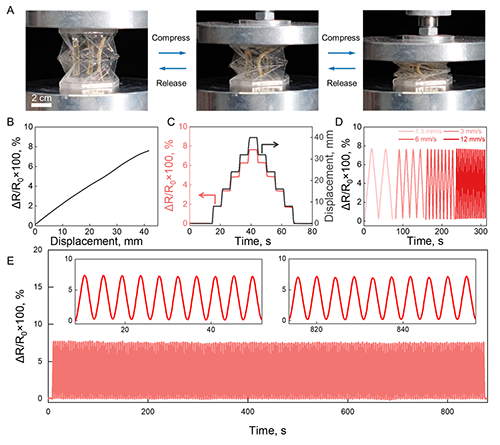
图6. 自感知折纸单元的传感性能
折纸模块充足的内部空间使得传感器的进一步集成成为可能。如图6所示,将三组明胶离子凝胶传感器嵌入折纸模块内部,离子凝胶传感器随着折纸模块的单轴压缩而产生弯曲,导致电阻发生变化,通过标定电阻变化和折纸位移变化的对应关系,实现了自传感折纸机器人模块的构筑。由于Kresling折纸单元的模块化特性,进一步将多个折纸模块串联,构筑的绳驱动折纸机械臂,具有伸缩和万向弯曲能力。
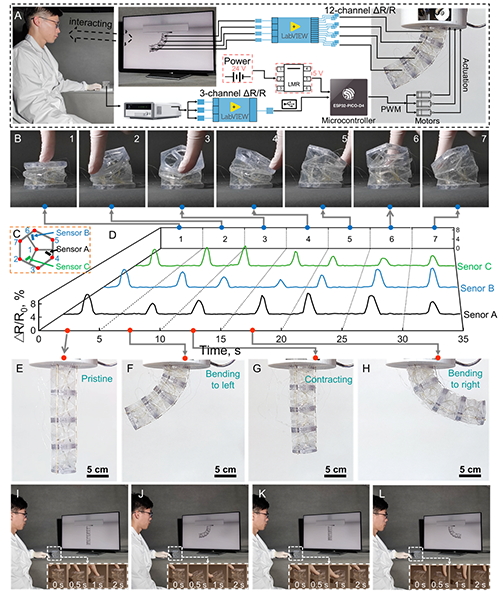
图7. 驱动-传感-交互闭环控制机器人系统构建
论文链接:https://www.science.org/doi/10.1126/sciadv.ads0217
博士后招聘:西湖大学姜汉卿课题组与复旦大学张壮课题组联合招收博士后。将提供灵活的工作模式,申请人可选择入站复旦大学或西湖大学,并支持海外交流。联合团队提供具有竞争力的薪资待遇与科研支持以及前沿的研究课题。申请者需取得或即将取得材料、机械、电子、自动化、计算机、生物医学工程等相关专业领域的博士学位。有意者请将将个人简历(包括教育和工作经历、主要科研内容、发表论文)以“博士后应聘+本人姓名”为主题发送至flexrob@fudan.edu.cn邮箱。
- 中山大学吴进等 AFM:基于坚韧可降解皮革水凝胶的自供电、超灵敏柔性H2S气体传感器 2026-06-05
- 天津大学汪怀远团队 AFM:本征高导热可降解树脂的突破 - 基于分子网络诱导-趋近策略制备本征高导热环氧树脂及其可降解性 2026-04-26
- 青岛能源所张海波研究员团队 Nat. Commun.:细菌纤维素作为可降解生物塑料助力可持续发展 2026-03-30
- 武汉理工熊传溪教授/杨全岭教授团队 Adv. Mater.: 一步法制备用于低介电常数印刷基材的非对称梯度孔乙基纤维素薄膜 2025-09-27
- 华工方志强/川大王静禹/广工邱学青《ACS Nano》:折纸龙结构启发的高韧性、高延展性纳米纤维素薄膜 2025-08-31
- 华南理工大学岳凤霞课题组 CEJ:氢键对木质素增强增韧纳米纤维素薄膜的影响 2022-10-31
- 伦敦玛丽女王大学陆遥教授、孟思宇博士 《ACS Nano》综述:超浸润材料的制造、应用及环境可持续性 2025-03-18
