人体皮肤内的传感系统能感知三维空间的刺激。受此启发,研究开发能够感知外力方向的多维柔性传感器,在智能机器人和人机交互等领域有非常重要的应用前景。基于水凝胶的应力、应变传感器生物相容性好、模量与组织相似、可拉伸、黏附性好,在柔性传感领域得到了广泛的研究和应用。但水凝胶易失水,受力时内部结构易破坏,常导致导电性下降、性能迟滞(Hysteresis)等问题,不利于传感器稳定工作。另一方面,多维传感器要求精确控制各向异性结构和传感性能,对传感材料的可加工性和结构调控提出了很高的要求。因此,研究制备低迟滞、低失水的水凝胶,创新器件制造方法,构建各向异性的多维传感器,是本领域亟待解决的关键科学问题。
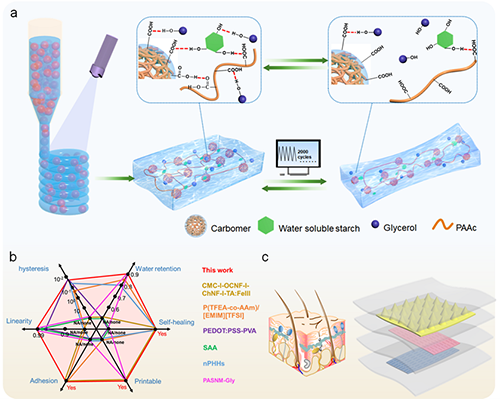
图1 低迟滞有机水凝胶的结构、性能及其用作多维传感器。
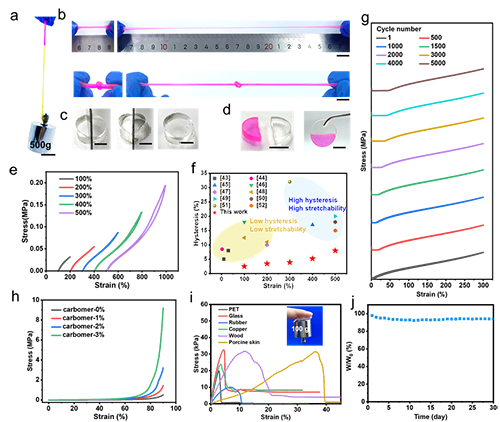
图2 有机水凝胶的力学性能、粘附性、自愈合性和保水性。
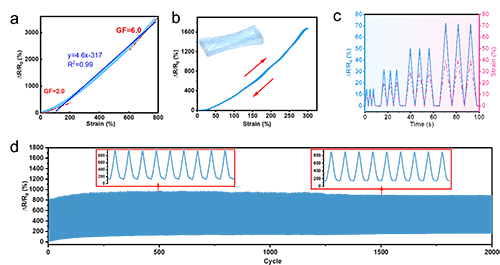
图3 有机水凝胶的传感性能
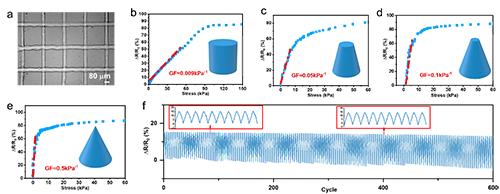
图4 有机水凝胶的3D打印性能
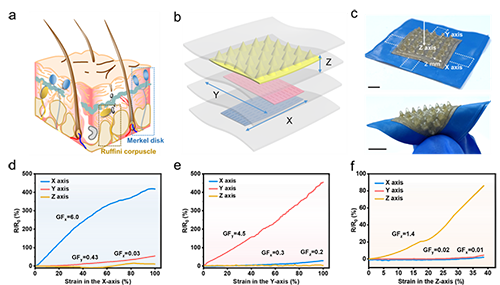
图5 皮肤启发的多维传感器
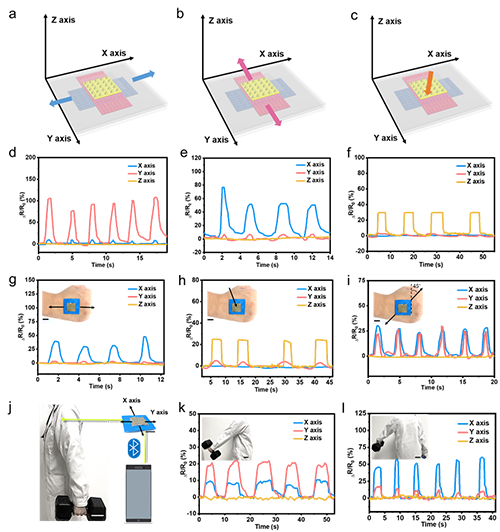
图6 多维传感性能
这种巧妙的多维结构使传感器能够确定应变的方向,是已有报道中单一结构的传感器无法实现的。将沿X轴、Y轴Z轴的拉力和压力分别施加到多维传感器上,三个子传感器会产生不同的ΔR/R0响应(图6a-f);可以作为可穿戴的电子皮肤来感知志愿者手部外力的大小和方向(图6g-i)。此外,多维传感器可以识别人体运动的起始和类型。将多维传感器安装在肩部,可以监测志愿者举哑铃时的运动细节,通过蓝牙将采集到的信号传输到手机上(图6j-l)。当志愿者来回挥动哑铃时,Y轴和X轴子传感器反复输出信号,Y轴信号强度高于X轴信号强度,反映了志愿者在不同方向上的运动幅度(图6k)。当志愿者沿体侧举哑铃和放哑铃时,X轴的信号强度则远大于Y轴(图6l)。
该研究工作通过对水凝胶网络结构的设计获得了具有低迟滞、可打印、低失水、抗疲劳等性能有机水凝胶,解决了水凝胶在力学加载中易松弛、易疲劳、易失水等问题。通过3D打印制备多维传感器,可以感知外界刺激的方向,识别人体运动,为感知3D刺激开辟了新的途径,有利于促进其在可穿戴运动识别和智能机器人感知系统等领域的应用。
论文链接:https://doi.org/10.1016/j.cej.2024.156581
- 南科大杨灿辉团队 Nat. Commun.:提出低迟滞强粘接高分子软材料力学设计原理 2025-07-05
- 中山大学付俊教授团队 Adv. Mater.:低迟滞、耐高低温的有机水凝胶人工触觉 2024-09-12
- 东华大学武培怡/孙胜童/刘凯团队 Adv. Mater.:低迟滞、高韧超分子聚合物离子凝胶 2024-08-31
- 西北大学魏洪秋副教授、于游教授团队 AFM:面向可定制化智能软设备的多功能、可打印聚氨酯材料 2025-04-15
- 加州理工学院高伟教授课题组 Nat. Mater.: 全打印MIP开创可穿戴与植入式双重应用新篇章 2025-02-05
- 四川大学雷景新教授、江亮副研究员《Adv. Sci.》:醇溶聚氨酯构建可打印、可回收、超快速响应的电容传感器 2024-10-19
- 成都大学魏竟江/王清远团队 Adv. Mater.:溶剂交换辅助机械训练制备仿肌腱的抗疲劳导电有机水凝胶 2026-05-09
