将功能、材质、形状和尺寸不同的水凝胶基元进行粘合是一种制造软体机器人的简便方法,但是却很难实现。这是因为:1)水凝胶的主要成分是水,不具备固体那样的轮廓分明的表面可供粘合;2)水凝胶发生体积和形状变化时很可能会破坏粘合层;3)一般的粘合剂无法满足软体机器人的部件可拆卸、可重构、可编程的要求。为了克服这些难点,中科大吴思教授团队设计了可逆光交联高分子构建的粘合剂,用于可逆粘合水凝胶基元。可逆光交联高分子通过界面互穿作用牢固地粘结水凝胶。这种粘合剂能适应被粘水凝胶的体积和形状的变化。此外,当被粘水凝胶需要拆卸和重新组装时,可逆光交联高分子能在光照下脱粘合。本工作报道的可逆光交联与界面互穿相结合的粘合剂设计方法不同于受贻贝启发的粘合剂的设计方法,为设计强而且可逆的粘合剂提供了新策略。该工作以Reconfiguring hydrogel assemblies using a photocontrolled metallopolymer adhesive for multiple customized functions为题目发表在Nature Chemistry上。吴思教授是该论文的唯一通讯作者,中科大为第一单位。
在这项工作中,吴思教授团队以钌配合物(Ru-H2O和Ru-SL)和硫醚配体(SL)作为模型化合物,利用核磁共振光谱和吸收光谱研究了光控制的可逆Ru-S键。数据表明Ru-S键在加热和光照条件下具有可逆性(图1)。因为bpy和tpy配体的作用,Ru-SL配合物中的Ru-S键比以前报道的光控可逆配位键更加稳定,不会发生水解,也能够耐受pH和温度变化。与传统的超分子相互作用不同,这种Ru-S键在稀释时不会解离。

图1. Ru-S键设计的可逆光交联粘合剂。a,使用可逆光交联设计的粘合剂用于粘结水凝胶I和水凝胶II。b,配合物(Ru-H2O)和配体(SL)在加热和光照条件下的可逆配位。c,Ru-H2O和SL在D2O中加热前、在加热后、在光照后(470 nm,60 mW/cm2)、再次后的1H NMR谱图。d,Ru-H2O和SL在加热前后、光照6分钟后(470 nm,60 mW/cm2)、再次加热后的吸收光谱。e,Ru-H2O和SL混合水溶液进行交替加热/光照循环的吸收变化。Adapted from Nat. Chem. 2024, DOI: 10.1038/s41557-024-01476-2, CC BY 4.0.
接下来,吴思团队合成了含钌的聚合物(P-Ru)和含硫醚的聚合物(P-S),构建了具有可逆光交联性能的P-Ru/P-S作为粘合剂(图2)。P-Ru/P-S在加热和光照下能发生可逆的凝胶溶胶转变。将P-Ru/P-S加到两片P1凝胶中间,通过热和光的作用可以实现粘合和脱粘。P-Ru/P-S对P1具有良好的粘合能力,是因为P-Ru/P-S与P1形成了界面互穿结构。

图2. 利用P-Ru/P-S的可逆光交联粘结P1凝胶。a,P-Ru和P-S的化学结构。b,P-Ru/P-S在加热和光照下的可逆凝胶溶胶转变。c-e, P-Ru/P-S粘结两片P1凝胶的示意图,照片和粘合强度数据。f-h,光照前、光照后和再粘结的两片P1凝胶界面处的SEM照片。在f中,富含P1和富含P-Ru/P-S的区域分别用白色和黄色框标出;红色箭头指示的部分是互穿网络中P1和P-Ru/P-S的混合形貌区域。Adapted from Nat. Chem. 2024, DOI: 10.1038/s41557-024-01476-2, CC BY 4.0.
为了阐明粘合机理,P1和P-Ru/P-S的界面结构通过EDS和和Raman mapping进行了研究(图3a-e)。这些数据证实了P-Ru/P-S与P1形成了界面互穿网络结构。荧光关联光谱和理论模拟数据表明P-Ru/P-S通过自由扩散、受限状态下的扩散和氢键重构的方式渗透到了P1凝胶网络中(图3f-h)。

图3. 界面互穿网络结构研究。a,P-Ru/P-S粘结的两片P1凝胶的SEM图。P-Ru/P-S富集区域、界面和P1富集区域分别为1、2和3。b,区域1、2和3的EDS数据。c-e,粘合界面处的拉曼图和光谱。f,荧光关联光谱实验的示意图。通过调整样品和物镜之间的距离,扫描Z方向的荧光标记的P-S的分布。g,沿Z方向的荧光强度。h,记录了荧光标记的P-S在P1凝胶(红色)和水相(黑色)中的归一化荧光强度自相关函数G(τ)。Adapted from Nat. Chem. 2024, DOI: 10.1038/s41557-024-01476-2, CC BY 4.0.
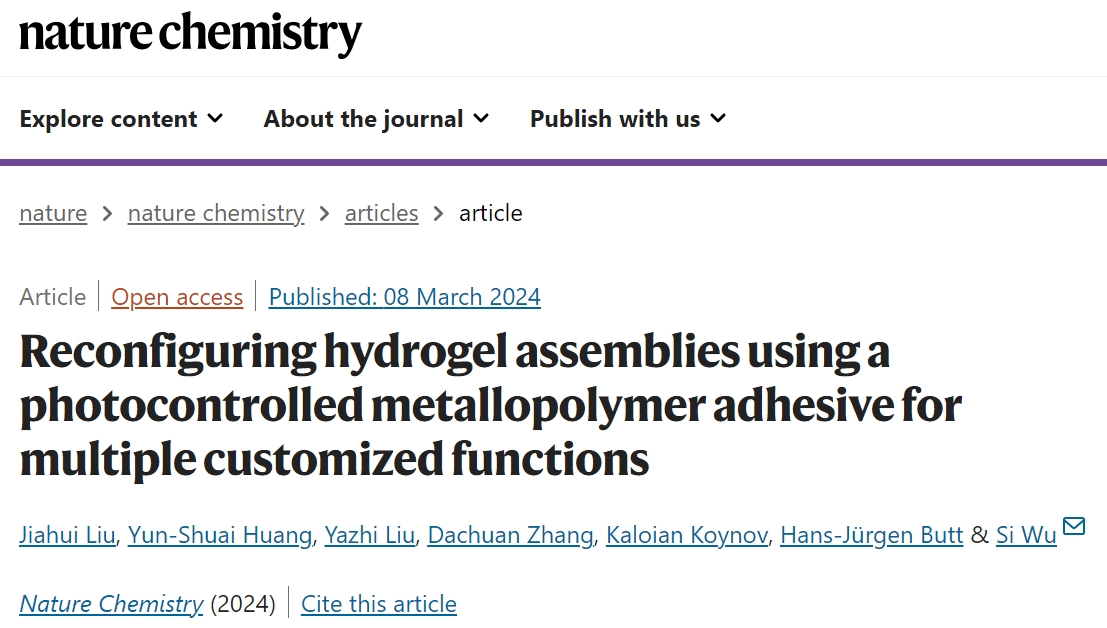
P-Ru/P-S对凝胶的粘合不受温度和pH的影响。利用这一特性,温度响应的P1/P2凝胶组装体和pH响应的P1/P3凝胶组装体被制备。它们在温度和pH变化下表现出可逆的形变(图4a-c)。P-Ru/P-S在形变下仍能牢固低粘合凝胶。P-Ru/P-S具有强粘合能力的原因包括:界面互穿网络结构、配位作用、不受温度和pH影响的粘结力以及P-Ru/P-S自身具有适应形状和体积变化的能力。利用这些性能,P-Ru/P-S被用于粘合不同的水凝胶,制备了水凝胶驱动器,并实现了驱动器的重构(图4d-f)。
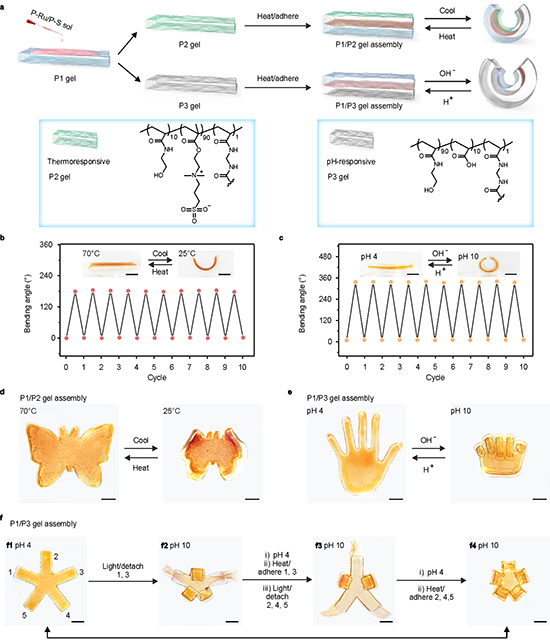
图4. 响应性水凝胶组装体的制备、驱动和重构。a-c,使用P-Ru/P-S作为粘合剂制备的温度和pH响应的水凝胶组装体。d-f,P-Ru/P-S粘结的不同的水凝胶组装体的形变和重构。Adapted from Nat. Chem. 2024, DOI: 10.1038/s41557-024-01476-2, CC BY 4.0.
P-Ru/P-S的可逆粘合作用实现了水凝胶组装体的重构和重新编程。P-Ru/P-S将一片P1凝胶、两片P2凝胶和两片P3凝胶粘合在一起,形成了具有复杂、异质结构的组装体1(图5a)。组装体1在不同温度和pH下形成了四种形状(图5b,第一列)。组装体1通过光诱导的脱粘和再粘合进行重构,使用相同的水凝胶基元形成了组装体2、3和4。每种凝胶组装体在pH和温度控制下都能形成四种形态。组装体具有类似孙悟空和变形金刚的多形态特性。

图5. 具有多种基元的水凝胶组装体的制备和形变。同样的水凝胶基元通过P-Ru/P-S的组装和pH与稳定的控制,形成了16种不同的形状。Adapted from Nat. Chem. 2024, DOI: 10.1038/s41557-024-01476-2, CC BY 4.0.
P-Ru/P-S将P1凝胶、pH响应的P3凝胶和磁性的P4凝胶进行了粘合,得到了具有复杂和异质结构的软机器人(图6)。机器人能在pH和磁场控制下变形和运动,实现了穿越迷宫。机器人可以在光照下拆解成P1/P3凝胶和P4凝胶,并进行重新的组装和利用。
图6. 软体机器人的制备和穿越迷宫。a-c,P-Ru/P-S粘合的P1/P3/P4机器人的结构和穿越迷宫的过程。d,P1/P3/P4机器人在光照后被拆解(d3和d4)。Adapted from Nat. Chem. 2024, DOI: 10.1038/s41557-024-01476-2, CC BY 4.0.
总之,上述工作证明可逆光交联高分子可以被用于设计强且可逆的粘合剂,并被开发复杂、异质、响应的水凝胶组装体和软体机器人。利用可逆光交联高分子设计粘合剂的方法不同于受贻贝启发的粘合剂设计方法,也不同于已报道的超分子粘合剂。它能适应水凝胶的形状和体积变化,能耐受温度和pH的变化。这一研究为开发新的可逆化学、界面拓扑结构、智能材料和软体机器人提供了新思路。
该工作得到了国家自然科学基金重点国际(地区)合作研究项目(52120105004)、国家自然科学基金面上项目(52073268)、中央高校基本科研业务费专项资金(WK3450000006和WK2060190102)、合肥市自然科学基金(2021013)、安徽省自然科学基金(1908085MB38)等项目的资助。在国家自然科学基金重点国际(地区)合作研究项目的资助下,马普高分子所的合作者参与了该研究。
吴思教授的研究方向为光响应高分子,作为通讯作者发表的代表性论文如下:

原文链接:
https://www.nature.com/articles/s41557-024-01476-2.pdf
https://www.nature.com/articles/s41557-024-01476-2
- 中科大吴思教授团队《Adv. Mater.》:在通用高分子中添加可逆光交联剂,构建可循环利用的热固性塑料 2023-07-05
- 东华大学武培怡/刘凯团队 Adv. Mater.:动态相锁定介导的强粘合剂 2026-07-06
- 华南理工王号兵教授团队 Macromolecules:钛催化分子重建将废塑料升级为高性能超分子粘合剂 2026-07-02
- 东华大学/苏州大学严锋教授团队 AM:将废弃PET升级为离子液体小分子粘合剂 2026-05-18
- 长春工大刘鑫、张钦课题组 Angew:一种兼具高机械强度与高锌离子迁移率的可回收超分子水凝胶电解质用于稳定锌负极 2026-07-13
- 浙江大学赵骞教授、浙江省肿瘤医院张宇华团队 Adv. Mater.:在可编程的自发变形水凝胶方面取得进展 2026-07-12
- 天工大张松楠 AFM 综述:水凝胶为光伏板“退烧” - 开启水-能协同热管理新路径 2026-07-10
