中国科大胡衍雷教授、吴东教授团队 Nat. Commun.:实现飞秒激光制造用于多样化液滴操纵的磁响应“双面神折纸”机器人
2023-09-09 来源:高分子科技
对跨尺度液滴的多样化操纵,在精细化学和生物医疗检测等领域都有重要的应用前景。从实用角度出发,有效的液滴操纵技术需要多功能集成及多尺度适用性。近年来,磁激励凭借其远程可控、生物安全性好、对环境透射率和基底电荷不敏感等优势已被广泛应用于液滴操纵领域。然而,如何进一步扩展磁响应液滴操纵的功能,并将多样化的液滴操纵功能从微升尺度扩展到纳升尺度仍极具挑战。

图1. 磁响应双面神折纸机器人及其多功能液滴操纵应用。

动图1. 磁响应双面神折纸机器人包裹并运输液滴。

图2. 基于磁响应双面神折纸机器人的液滴搅拌、光热搅拌以及多功能液滴操纵集成。

动图2. 磁响应双面神折纸机器人用于实现液滴快速混合。
动图3. 多样化液滴操纵功能集成。
最后,作为概念验证,他们通过对磁响应双面神折纸机器人进行表面修饰,并结合其多样化的液滴操纵功能,成功实现了核酸的提取和纯化(图3)。
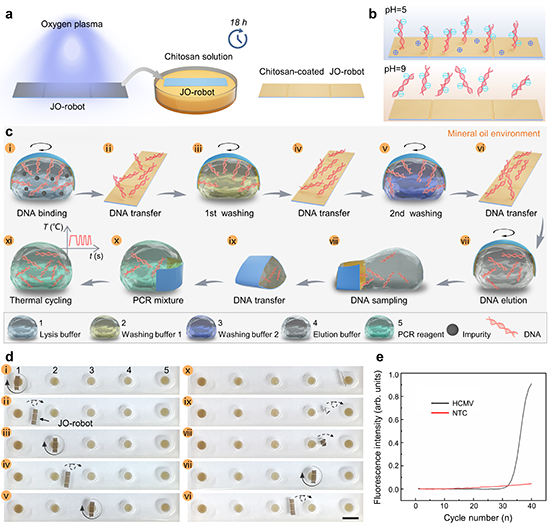
图3. 基于磁响应双面神折纸机器人的核酸提取与纯化应用。
工程科学学院蒋绍军博士为论文第一作者。通讯作者为中国科学技术大学胡衍雷教授、吴东教授和香港理工大学王立秋教授。论文的合作者还包括中国科学技术大学褚家如教授、李家文副教授、中国科学院合肥物质科学研究院安徽光学精密机械研究所朱灵研究员、中国科学技术大学第一附属医院沈佐君教授等。该项研究工作得到了国家自然科学基金优秀青年科学基金、中国科学院青年创新促进会、科技部国家重点研发计划等基金等项目的支持。
论文链接:https://www.nature.com/articles/s41467-023-41092-1
版权与免责声明:中国聚合物网原创文章。刊物或媒体如需转载,请联系邮箱:info@polymer.cn,并请注明出处。
(责任编辑:xu)
相关新闻
- 天大封伟教授团队 Mater. Today:跨尺度键合作用视角下的光热能转换机制与材料设计 2026-04-21
- 上海交大刘烽/伯克利实验室王诚/华南理工钟文楷 Nat. Commun.:共轭高分子在机械应变下的跨尺度关联演化与构效关系 2026-03-02
- 西工大刘剑刚教授团队 AFM:深度解析高效有机光伏中非富勒烯受体的跨尺度氟化机制 2025-09-12
- 电子科技大学及南洋理工大学团队《Adv. Mater.》:3D打印磁性软体机器人实现液滴的灵活操纵及体外诊断 2022-02-18
- 湖南大学王兆龙课题组《ACS AMI》:3D打印制备仿生超疏水微结构用于微液滴操纵 2020-12-30
- 西安交大研究人员发现新的浸润现象,将在油水分离、液滴操纵等领域有重要应用 2017-06-07
- 厦门大学侯旭教授团队 AFM:具有颜色指示气体输运开关阈值的磁响应光子液体门控 2025-07-02
