东南大学李全院士团队 PNAS(美国国家科学院院刊):微管胶体机器人
2023-09-08 来源:高分子科技
近日,东南大学智能材料研究院、化学化工学院李全院士团队在微型胶体机器的组装和操控方面取得重要突破。相关成果以“Colloidal tubular microrobots for cargo transport and compression”为题,在线发表在国际顶级期刊PNAS(美国国家科学院院刊)上。东南大学博士生王小雨为第一作者,李全院士和杨涛副教授为共同通讯作者。
李全院士团队提出了一种介稳态的胶体结构组装方法,通过组装路径设计,首次实现了由超顺磁性胶体微球组装成复杂的三维空心管状结构。该方法适用范围广,能实现从200纳米到30微米超顺磁性胶粒在包括血液在内的非牛顿流体内的多次反复组装。

图1.胶体薄膜在磁场作用下卷曲成微管结构的组装过程,实验(A)和模拟(B)。
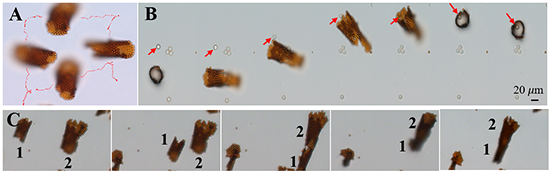
图2.外部磁场控制微管机器人的运动方向(A),货物抓取运输(B)及轴向组装(C)。

原文链接:https://www.pnas.org/doi/10.1073/pnas.2304685120
版权与免责声明:中国聚合物网原创文章。刊物或媒体如需转载,请联系邮箱:info@polymer.cn,并请注明出处。
(责任编辑:xu)
相关新闻
- 暂无相关新闻
