深大黄龙彪/西工大孔杰/香港理工郝建华 AFM:适应于软体机器人的自修复多模态传感器
2023-07-14 来源:高分子科技
近日,深圳大学黄龙彪、西北工业大学孔杰和香港理工大学郝建华课题组合作报道了具有自修复和可拉伸性能的多功能高分子材料,能够制备成适应于软体机器人的多模态传感器以检测多种信号,包括形变、温度和运动状态等(Adv. Funct. Mater. 2023, 2304415)。

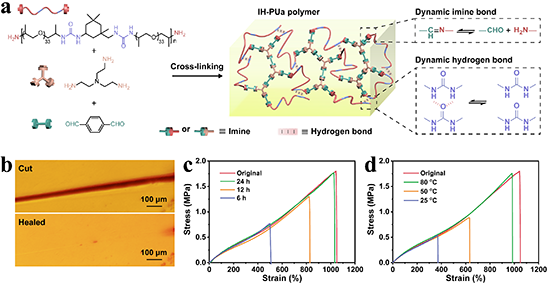
图1 基于动态亚胺键和氢键的交联IH-PUa聚合物网络结构示意图和自修复性能
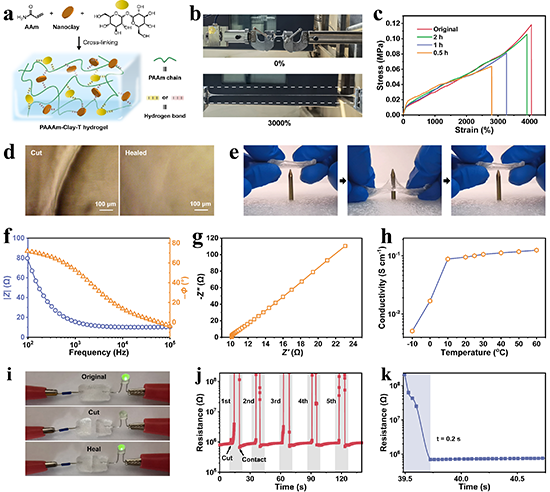
图2 含氢键的PAAm-Clay-T水凝胶交联网络结构示意图及其力学、电学和自修复性能
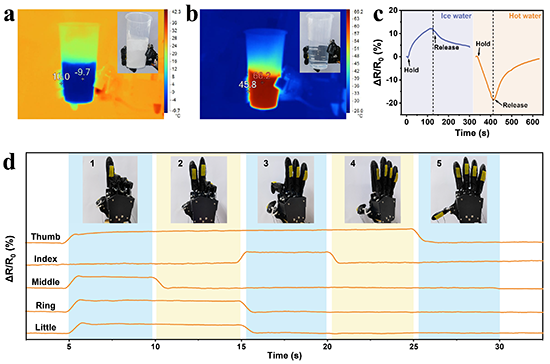
图3 传感器附着于机械手上用于温度和手势检测的演示
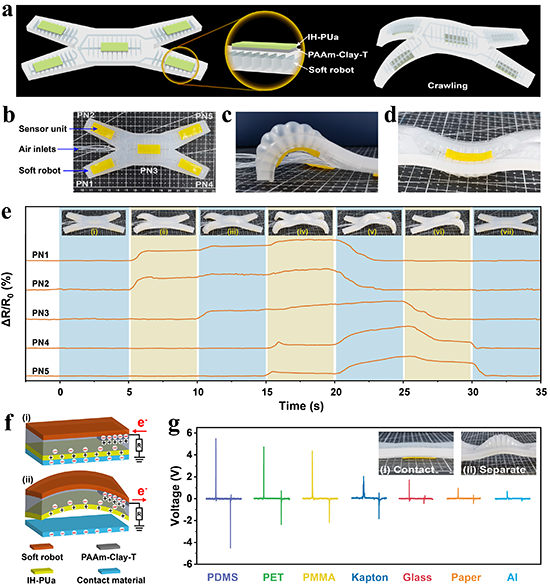
图4 基于摩擦电效应传感器的工作机制和输出电性能
论文链接:https://onlinelibrary.wiley.com/doi/10.1002/adfm.202304415
版权与免责声明:中国聚合物网原创文章。刊物或媒体如需转载,请联系邮箱:info@polymer.cn,并请注明出处。
(责任编辑:xu)
相关新闻
- 陕科大强涛涛、任龙芳教授团队 AFM:具有应变传感和溶剂触发报警的双模态仿生自修复聚氨酯基离子凝胶传感器 2026-06-22
- UIUC自修复材料实验室 Nat. Mater.:拓扑缠结赋能高性能热固性材料循环利用 2026-06-16
- 中国林科院林化所张猛/悉尼大学程文龙/南昆大宋平安 Adv. Mater.:含磷/氮及π-共轭联苯结构单元实现弹性体高强、高韧、阻燃及自修复 2026-06-01
- 浙理工胡毅教授团队 AFM:基于多功能固态碳点的多色可拉伸交流电致发光器件实现智能人体运动监测 2026-07-18
- 中科院长春应化所刘俊团队 Matter:蜂窝网络形貌赋能超可拉伸有机光电探测器 2026-06-19
- 芝加哥大学王思泓教授团队 Nat. Electron.: 大规模可拉伸神经形态电路 - 用于体表边缘计算 2026-05-23
- 上海交大刘尽尧研究员团队《Adv. Mater.》:活体药物智能递送新策略 - 给细菌穿上一件多功能高分子外衣 2021-03-06
