四川大学张新星教授团队《Nano lett.》:强韧化可修复的光驱动软体机器人用于吸附微塑料
2022-06-26 来源:高分子科技
与传统的刚性机器人相比,软体机器人具有与人交互性好、灵活性高、柔韧性好等独特优势,引起了人们的广泛关注。综合考虑操作的实用性和稳定性,集成、轻量化和智能化是软机器人的发展方向。引入机械手等额外的分离功能模块,不利于机器人的快速和稳定运行。此外,现有的水生软体机器人(Nature 2021, 591, 66–71; Sci. Adv. 2017, 3, e160204)多为电机或燃油发动机驱动,难以满足环境友好和可持续驱动的需求。一些光响应的自驱动水凝胶由于其固有的机械性能差,在复杂的水生环境中容易受到破坏,成为这些微型机器人在实际应用时的另一个主要障碍。因此,如何制备强韧化、可修复的自驱动集成机器人仍然是一个重大挑战。

图1 软体机器人材料结构设计
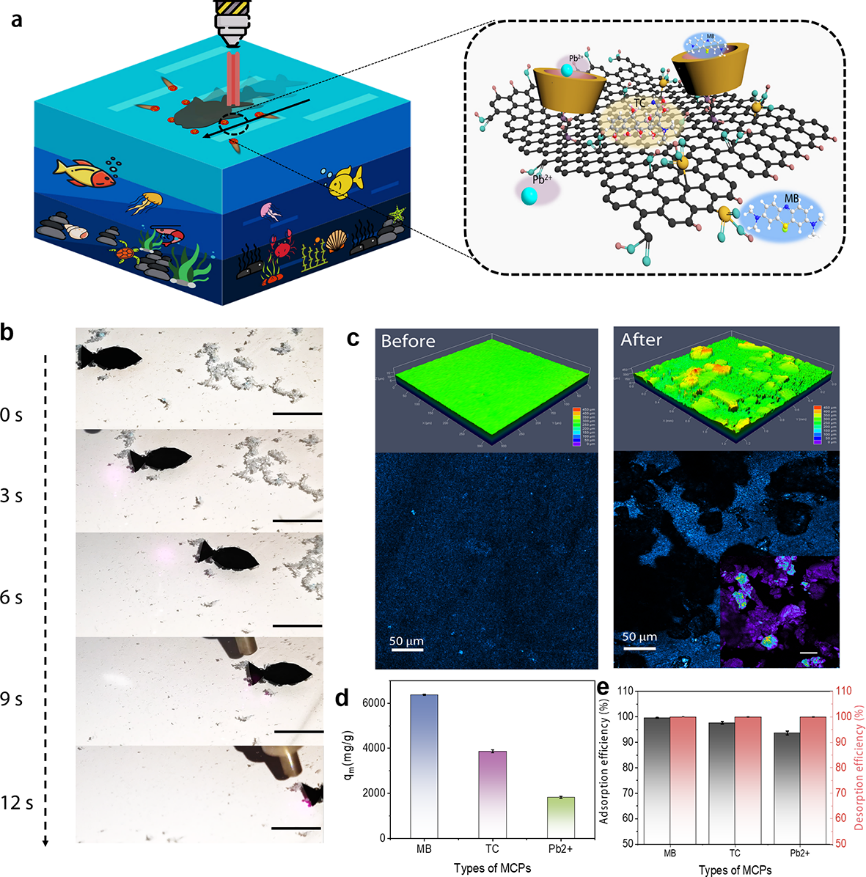
图2 微型机器人微塑料吸附功能
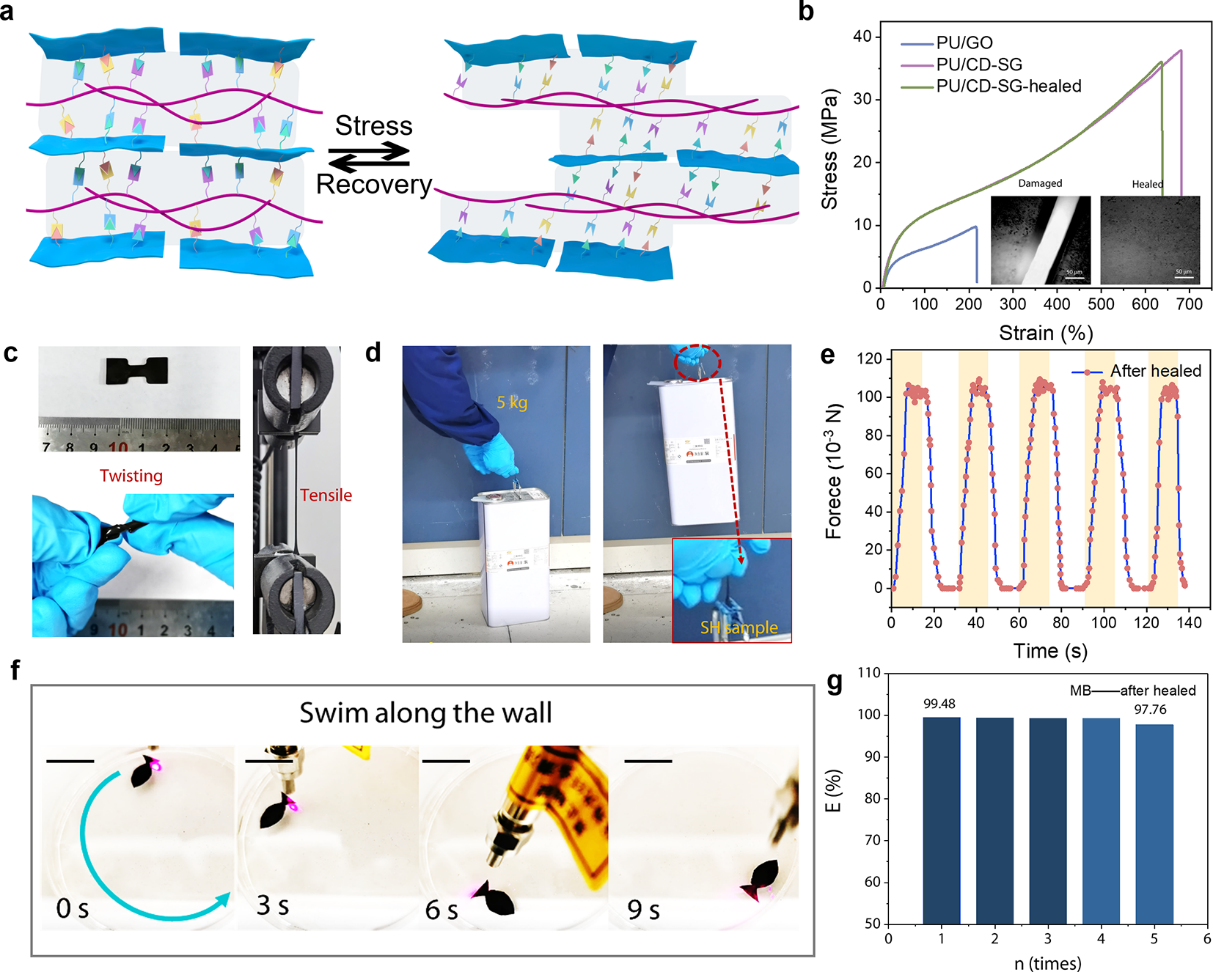
图3 机械性能与功能修复
版权与免责声明:中国聚合物网原创文章。刊物或媒体如需转载,请联系邮箱:info@polymer.cn,并请注明出处。
(责任编辑:xu)
相关新闻
- UCLA贺曦敏团队 Sci. Adv. 封面:球形无系留自维持滚动机器人 2026-05-01
- 哈工大(深圳)朱时裴教授课题组诚招硕士、博士、博士后 - 材料、化学、物理、机械、生物工程 2025-09-17
- 深圳大学黄龙彪教授团队 《Adv. Sci.》综述:生物可降解材料在软体机器人与柔性电子领域的研究进展 2025-09-10
- 大连理工大学韩丽、舍布鲁克大学赵越 JMCA(HOT Paper):无交联策略制备热塑性液晶弹性体驱动器 2026-04-30
- 浙江大学郑宁研究员团队 Nat. Commun.: “变形即走”液晶弹性体驱动器制备方法 2025-08-18
- 北化杨丹教授 Adv. Mater.:基于介电弹性体驱动器和摩擦纳米发电机的自供电、自愈合仿人眼外肌驱动器 2023-12-09
- 中国林科院林化所张猛/悉尼大学程文龙/南昆大宋平安 Adv. Mater.:含磷/氮及π-共轭联苯结构单元实现弹性体高强、高韧、阻燃及自修复 2026-06-01
