哈尔滨工业大学化工与化学学院韩晓军课题组和奥胡斯大学生物化学工程Menglin Chen课题组将熔融电纺丝书写技术(MEW)、微成型和切削技术技术相结合,成功地批量化制备出可人工设计的磁性微机器人。在外部磁场下,实现了可控的滚动和推进运动,并展现出优异的货物操纵和运输能力。

微型机器人的研发对微型无人飞行器、未知环境检查和探索、微创医疗手术及靶向给药等方面具有重要的意义。目前的微机器人可由超声波、光、热、气泡和磁场驱动。其中磁场驱动的微机器人由于其高度可控,引起了人们更多关注。磁性螺旋、纳米线和胶体多功能马达均被报道。精子模板法、磁控溅射沉积法和自卷曲法也是制备磁性马达常用方法。而新一代马达要求特定的设计以实现预期功能,因而可结构设计的马达制造新策略(例如掠角沉积技术和3D激光打印技术)被提出来。普通用户无法利用该技术实现微机器人的制造。因此,需要一种简单且廉价的技术实现微机器人的设计及制备。
熔融静电纺丝书写技术(MEW)融合了熔体静电纺丝和3D打印技术,相比于与传统的3D打印,MEW可以得到小2个数量级的微米纤维。MEW所制备的产品可作为生物相容性支架,用于细胞培养和组织工程。MEW实现了可编程的静电纺丝,并以批量生产的方式沉积在特定部位,纤维直径和纤维形状均显示出高度的可控性,可在计算机控制下设计复杂的形状或几何形状。在科研中,切片机不仅可产生超薄切片,用于获得光学或电子显微图像,而且还可用于制造微纳米材料,被命名为“切削技术”,可用于制备单独的纳米线或阵列、量子点和聚合物纳米圆筒。将MEW技术与切削技术结合,其中MEW技术可以人工设计微纤维,而切削技术可将所设计的微纤维切成薄片,以批量制备微纳米结构。
哈尔滨工业大学韩晓军课题组和奥胡斯大学Menglin Chen课题组提出了使用成本低和方法简单的MEW技术应用于磁性微机器人制造的方法。MEW可以直接将聚己内酯(PCL)融化打印出不对称条状PCL,以此不对称PCL作为模板,制备不对称聚二甲基硅氧烷(PDMS)通道。而后,将通道填充PCL/Fe3O4混合物,固化后,将改磁性坯料脱模,通过切削技术得到蝌蚪状的磁性微机器人。该微机器人通过无线动态磁场实现了两个独立的运动(推进和滚动),通过磁场的频率、强度和方向可调节该微型机器人的速度和方向,并展现出优异的货物操纵和运输能力。
研究者相信,MEW的使用使得横截面形态可设计的微机器人的构建成为可能。基于坯料的设计及精确微切削过程,该制造过程具有高度可重复性、低成本和批量生产的能力。在成型过程中引入具有不同功能的纳米材料,可将微机器人设计为具有不同功能甚至多功能的仿生微机器人。MEW、微成型和切削技术的联用在制造通用微机器人方面拥有巨大潜力。相关论文在线发表在Advanced Sciecne 上。

图1.磁性类蝌蚪微机器人的制造过程示意图。PCL不对称模板(A),聚二甲基硅氧烷(PDMS)不对称通道(B)和PCL/Fe3O4不对称微型机器人(C)的示意性制造工艺。

图2. 聚二甲基硅氧烷(PDMS)通道和磁性PCL/Fe3O4不对称坯料的表征。(A)以不同打印速度制备的PDMS通道的横截面扫描电子显微镜(SEM)图像;(B)通道的宽度和深度与打印速度的关系;(C)具有不同形状非对称PDMS通道横截面的SEM图像;(D)通道2的光学显微镜图像;(E)以通道2为模板制备的磁性PCL/Fe3O4不对称坯料的SEM图像。打印速度值标记在每个图像上,单位为mm min-1。

图3. 类蝌蚪磁性微机器人的表征和可控制运动。(A)PCL/Fe3O4磁性微机器人SEM图像,附带C,O和Fe元素分布;PCL/Fe3O4磁性微机器人的局部放大SEM图像(B)和EDX光谱分析(C);在滚动(D,E)和推进(G,H)磁场(4 Hz,1.85 mT)下的微机器人的光学显微镜图像和3D示意图;微型机器人在滚动(F)和推进(I)磁场(12 Hz,1.85 mT)下运动的延时显微镜图像。PCL/Fe3O4磁性微机器人在滚动模式(J,K)和推进模式(L,M)下,速度与磁场频率、强度的关系。
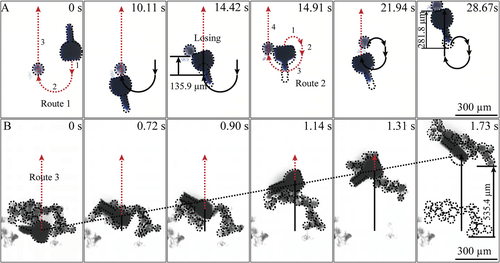
图4. 类蝌蚪磁性微机器人在4 Hz和1.85 mT的磁场下运载微球。(A)推进模式下,通过头部进行单个货物操纵;(B)滚动模式下的多货物运输。
相关工作以“Melt Electrospinning Writing of Magnetic Microrobots”为题,发表在Advanced Sciecne (DOI: 10.1002/advs.202003177)上。哈尔滨工业大学韩晓军教授和丹麦奥胡斯大学Menglin Chen教授为论文共同通讯作者。
原文链接:
Yingchun Su et al. Melt Electrospinning Writing of Magnetic Microrobots. Advanced Science, 2020.
https://onlinelibrary.wiley.com/doi/10.1002/advs.202003177
- 暂无相关新闻
